Camera Calibration Image Alignment Augmented Reality 2 CV
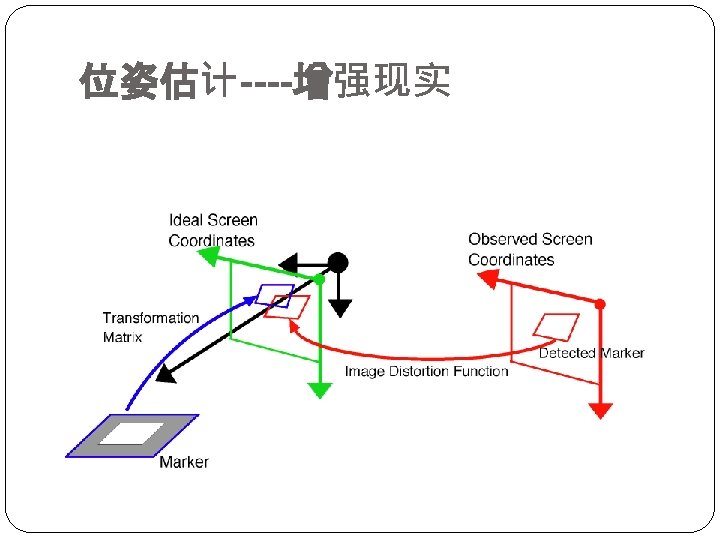
 图像对准(Image Alignment) 位姿估计-增强现实(Augmented Reality) 2 CV: Calibration 2021/2/20")
主要内容 摄像机标定(Camera Calibration) 图像对准(Image Alignment) 位姿估计-增强现实(Augmented Reality) 2 CV: Calibration 2021/2/20

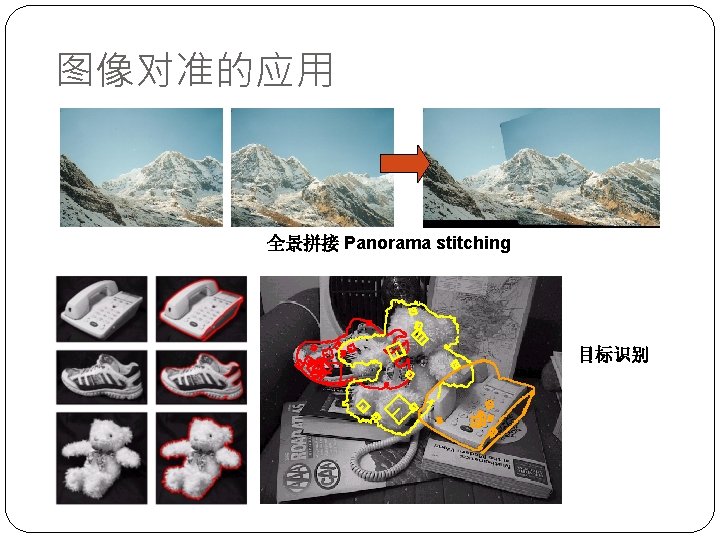
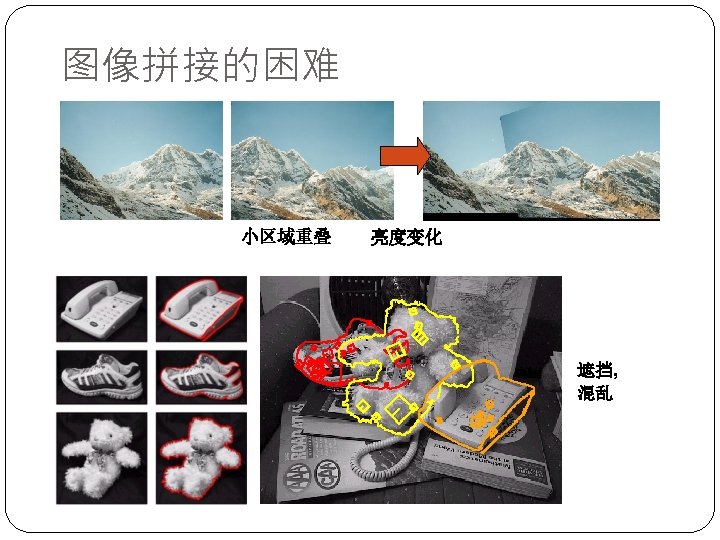
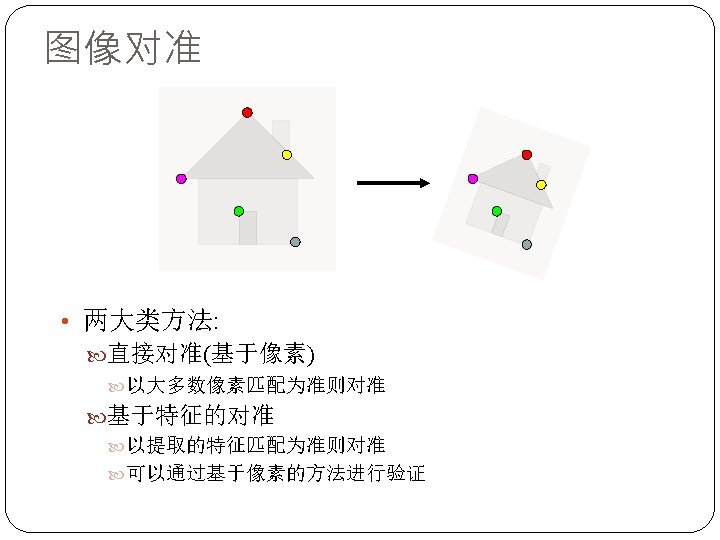
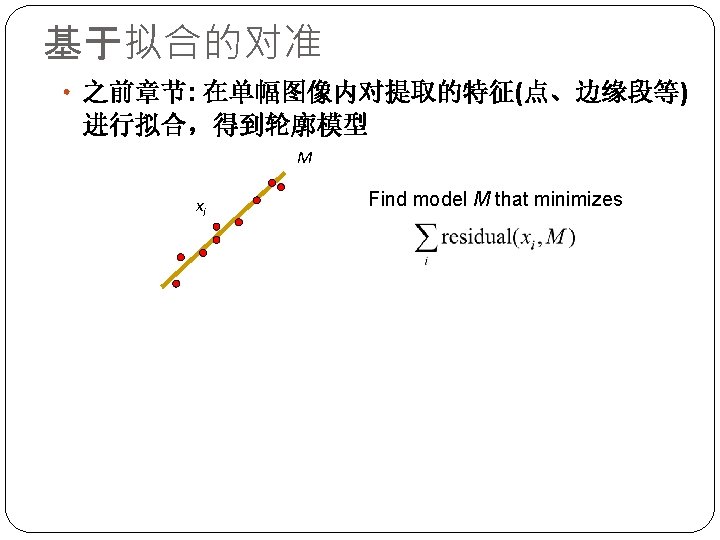
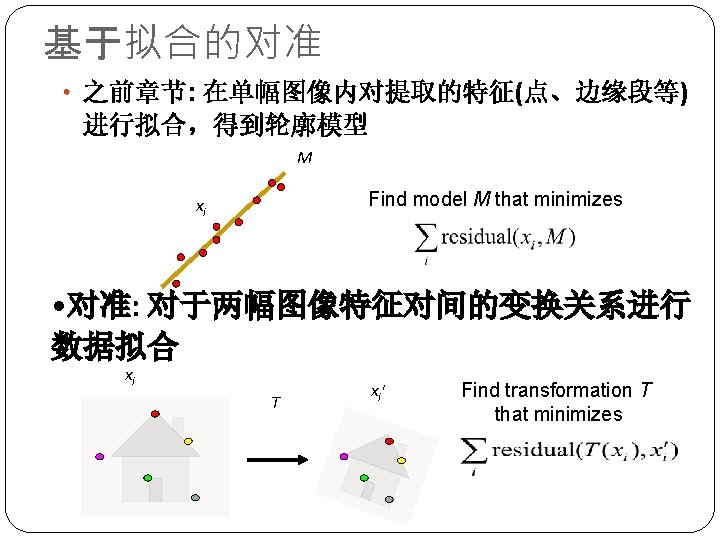
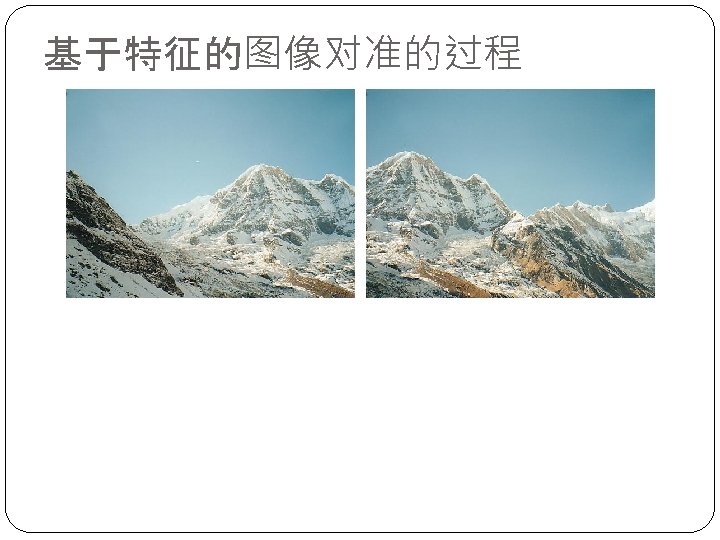
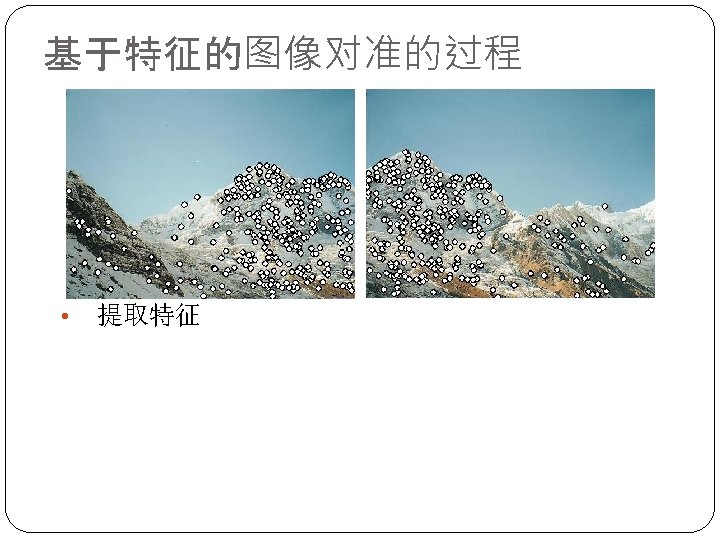
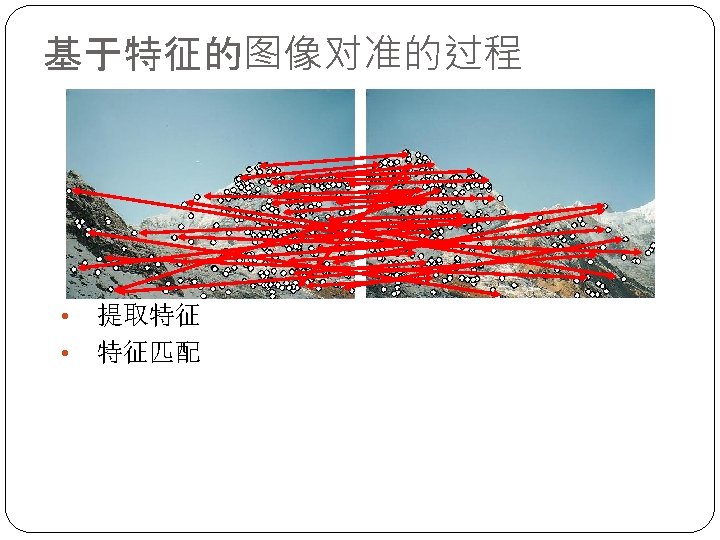
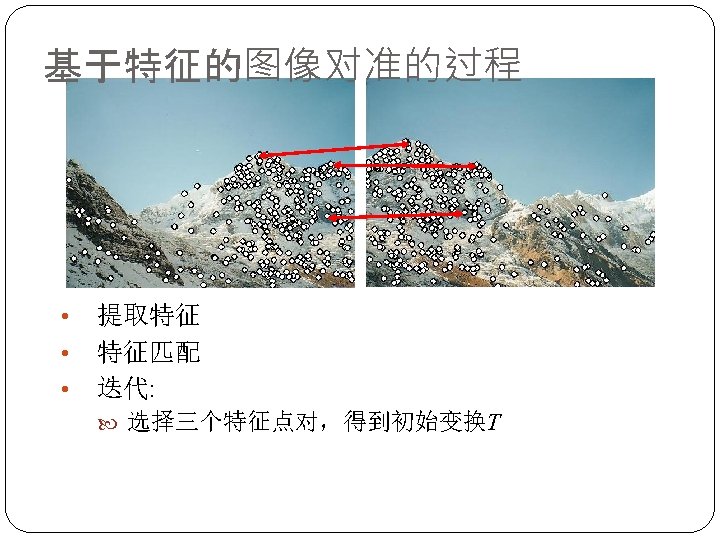
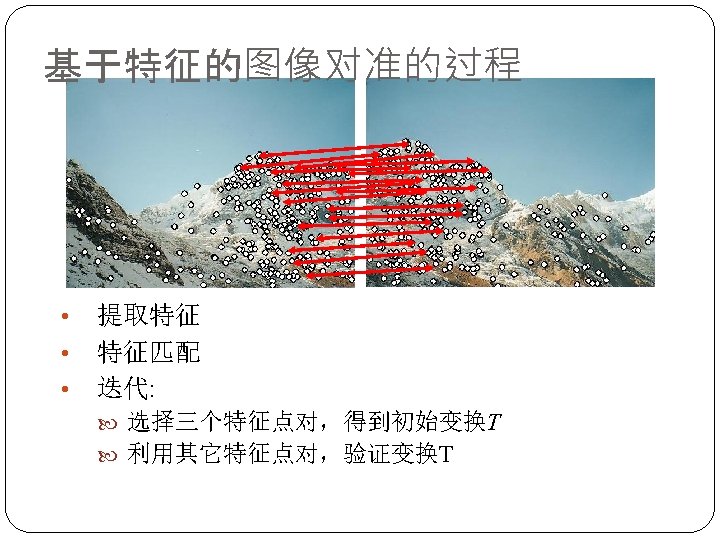
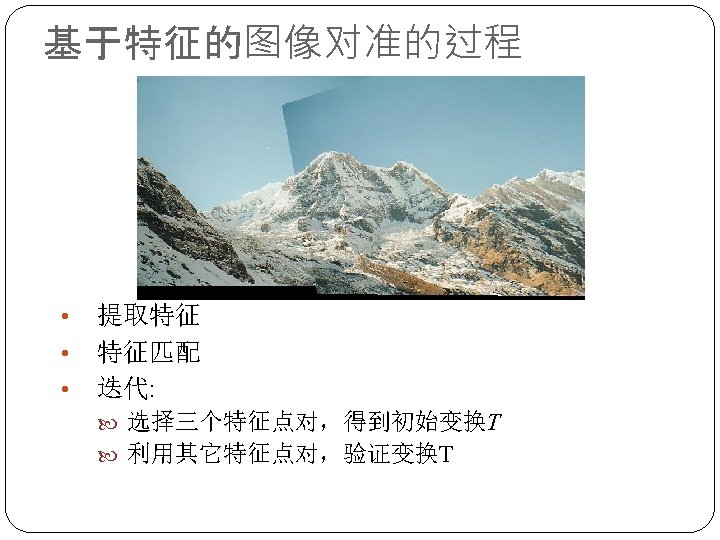
图像对准-Image alignment

A look into the past http: //blog. flickr. net/en/2010/01/27/a-look-into-the-past/

A look into the past Leningrad during the blockade http: //komen-dant. livejournal. com/345684. html

Bing streetside images http: //www. bing. com/community/blogs/maps/archive/2010/01/12/new-bing-mapsapplication-streetside-photos. aspx
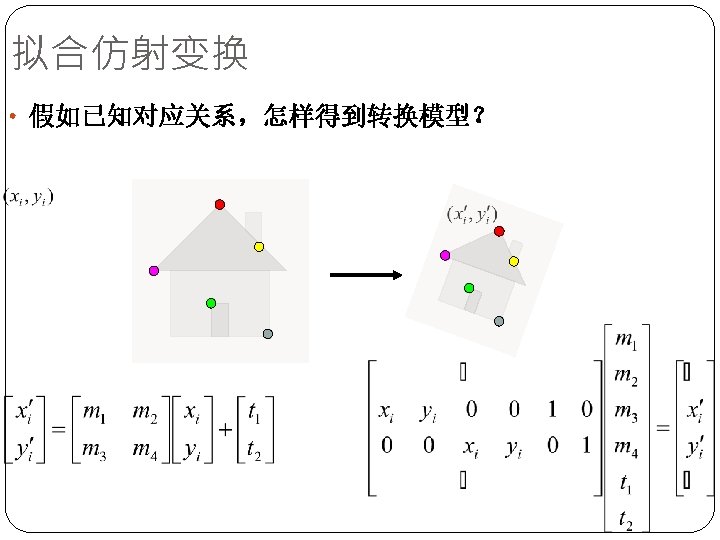
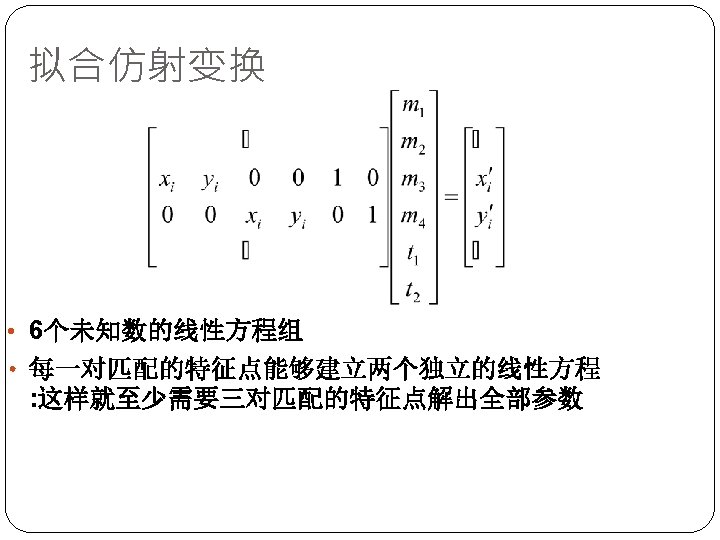
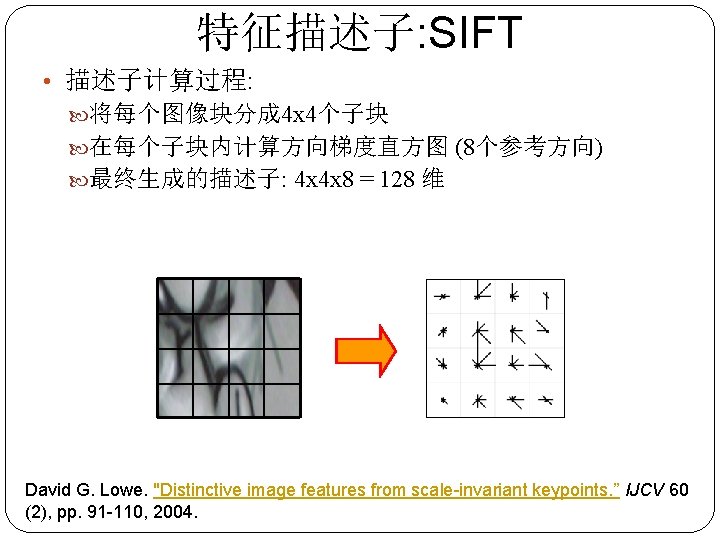
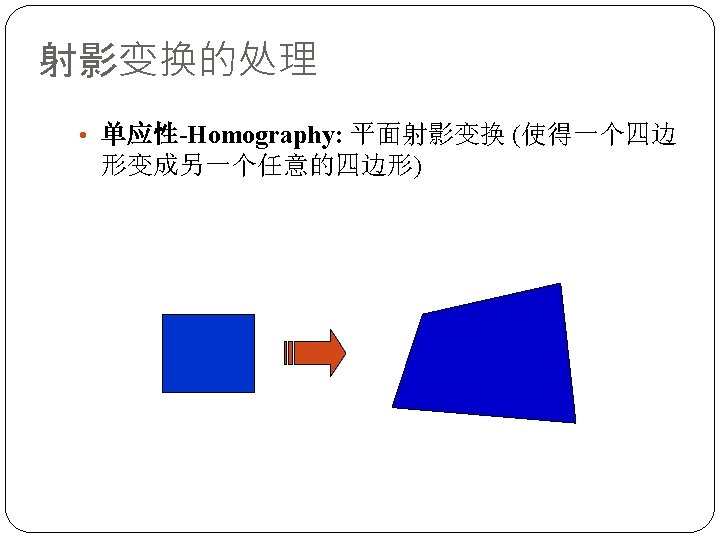
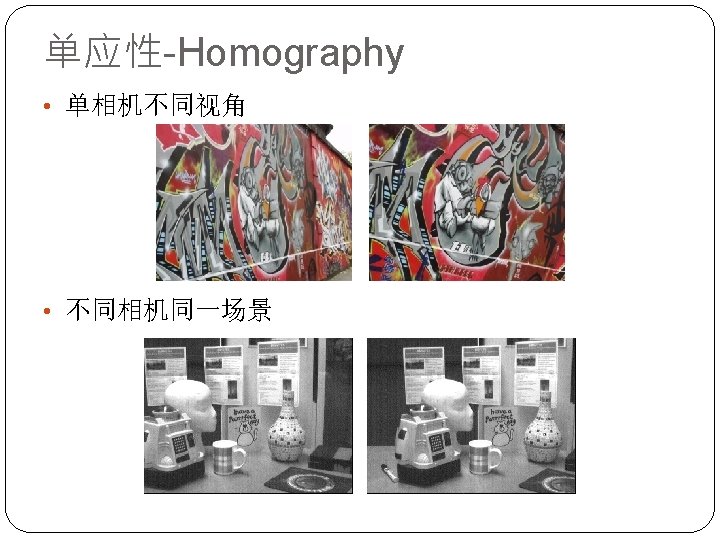
 • Affine • Projective (homography)")
2 D 转换模型 • Similarity (translation, scale, rotation) • Affine • Projective (homography)

外点的处理 • 几何拟合方法: RANSAC Hough transform

RANSAC loop: Randomly select a seed group of matches 2. Compute transformation from seed group 3. Find inliers to this transformation 4. If the number of inliers is sufficiently large, re-compute least-squares estimate of transformation on all of the inliers 1. Keep the transformation with the largest number of inliers

RANSAC example: Translation Putative matches

RANSAC example: Translation Select one match, count inliers

RANSAC example: Translation Select one match, count inliers

RANSAC example: Translation Select translation with the most inliers

Hough transform • Recall: Generalized Hough transform model visual codeword with displacement vectors test image B. Leibe, A. Leonardis, and B. Schiele, Combined Object Categorization and Segmentation with an Implicit Shape Model, ECCV Workshop on Statistical Learning in Computer Vision 2004
 model David G. Lowe. \"Distinctive image")
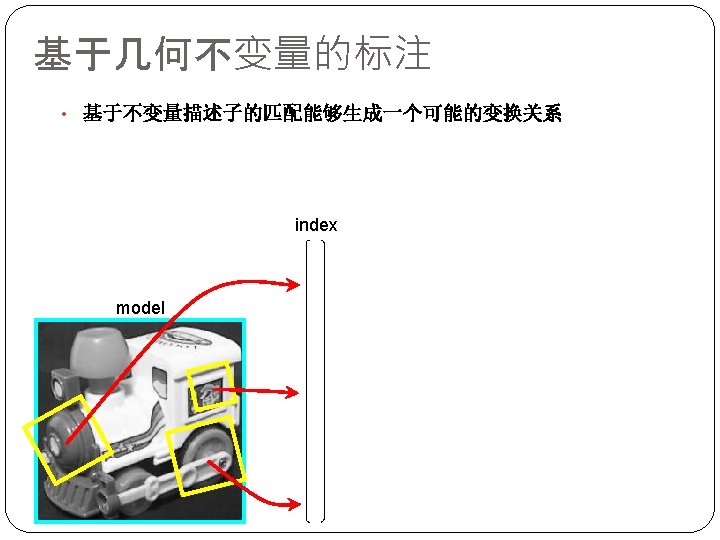
Hough transform • 假如提取的特征具有尺度和旋转不变性 这样单个特征匹配就能提供一种可能的对准 (translation, scale, orientation) model David G. Lowe. "Distinctive image features from scale-invariant keypoints. ” IJCV 60 (2), pp. 91 -110, 2004.
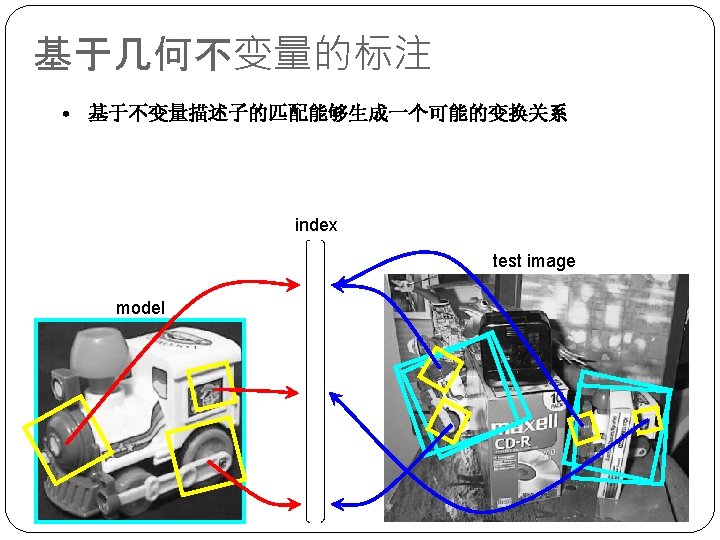
 当然这种对准是不可靠的 解决办法: 将各种可能的对准映射到Hough 空间中投票,选择得分最高的 model David")
Hough transform • 假如提取的特征具有尺度和旋转不变性 这样单个特征匹配就能提供一种可能的对准 (translation, scale, orientation) 当然这种对准是不可靠的 解决办法: 将各种可能的对准映射到Hough 空间中投票,选择得分最高的 model David G. Lowe. "Distinctive image features from scale-invariant keypoints. ” IJCV 60 (2), pp. 91 -110, 2004.

单应性拟合 • 齐次坐标 Converting to homogenenous image coordinates Converting from homogenenous image coordinates

单应性拟合 • 齐次坐标 Converting to homogenenous image coordinates • 单应性方程 Converting from homogenenous image coordinates

单应性拟合 • 单应性方程 3 equations, only 2 linearly independent
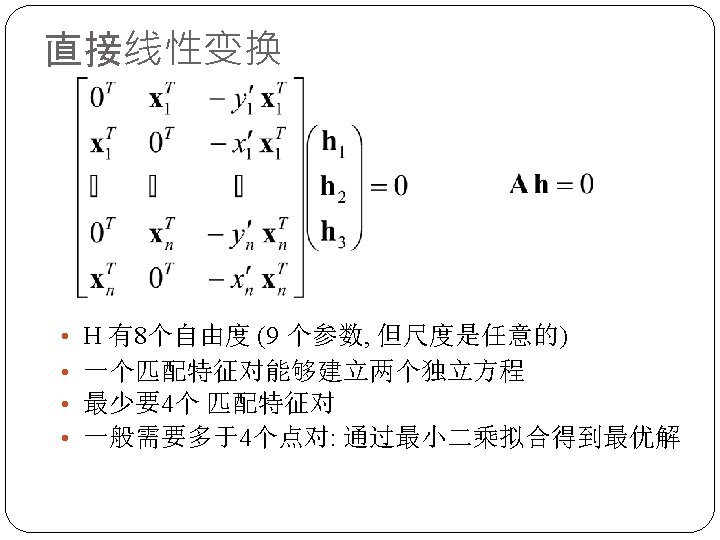

直接线性变换 Orders of magnitude difference between column of data matrix least-squares yields poor results. How to do ?
")
Singular value decomposition (SVD)

Every matrix represents a transformation http: //www. uwlax. edu/faculty/will/svd/index. html

Singular value decomposition

Singular value decomposition

Pseudo-inverse
")
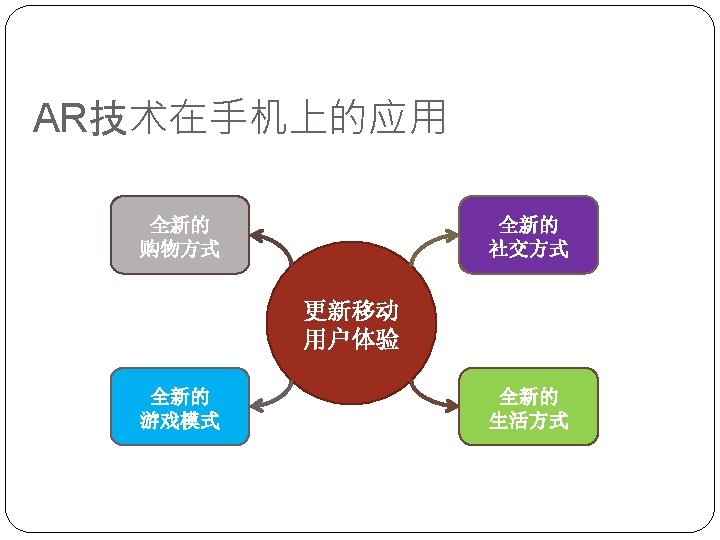
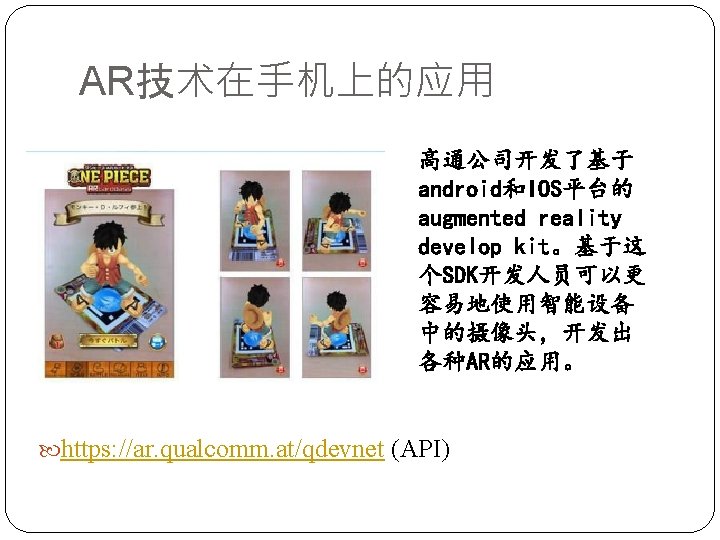
AR技术在手机上的应用 http: //www. layar. com (i. Phone API)

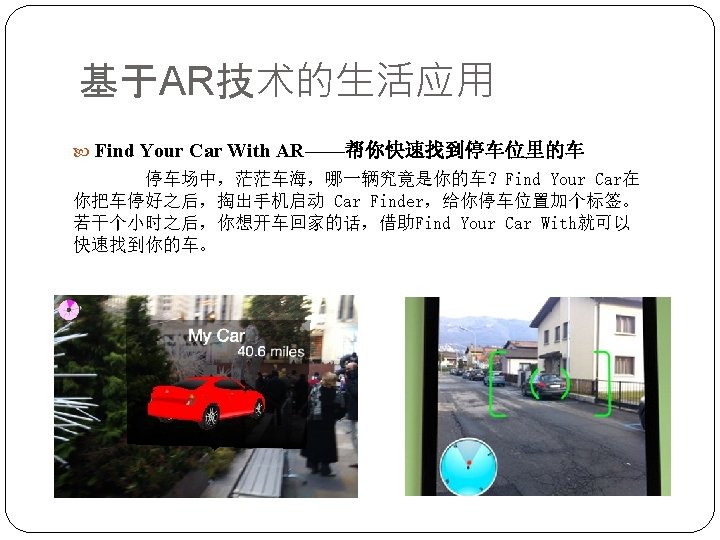

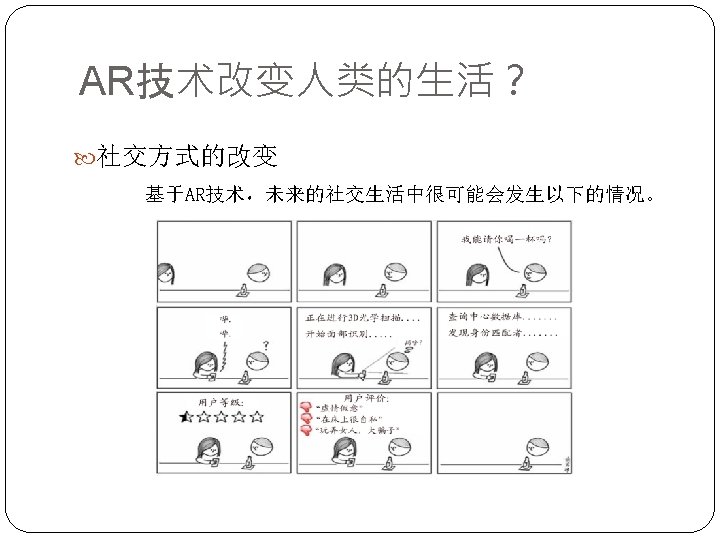
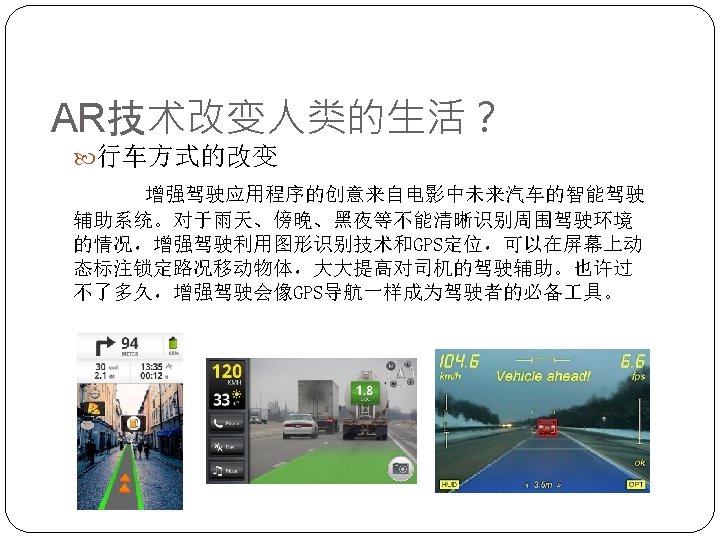
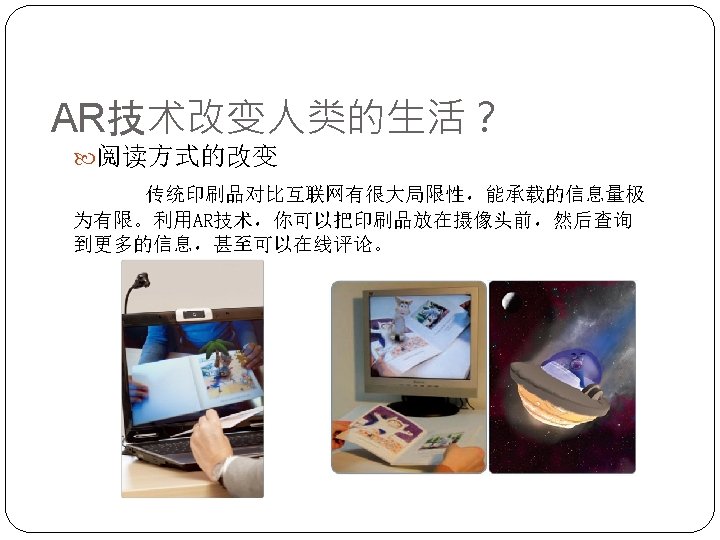

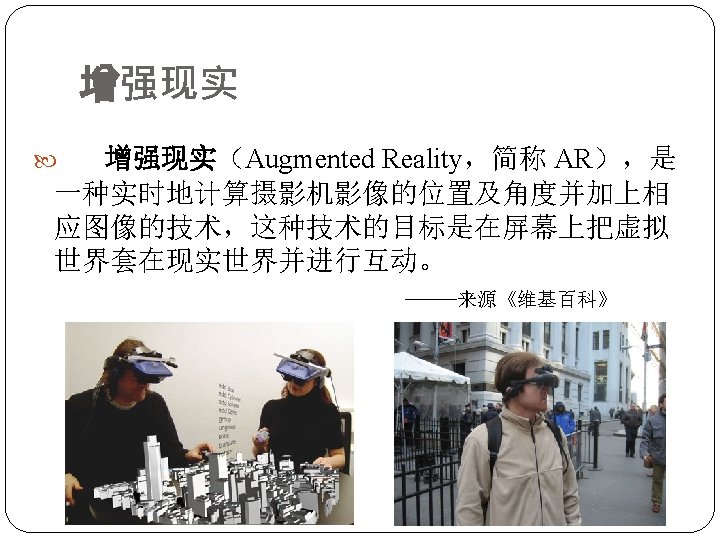
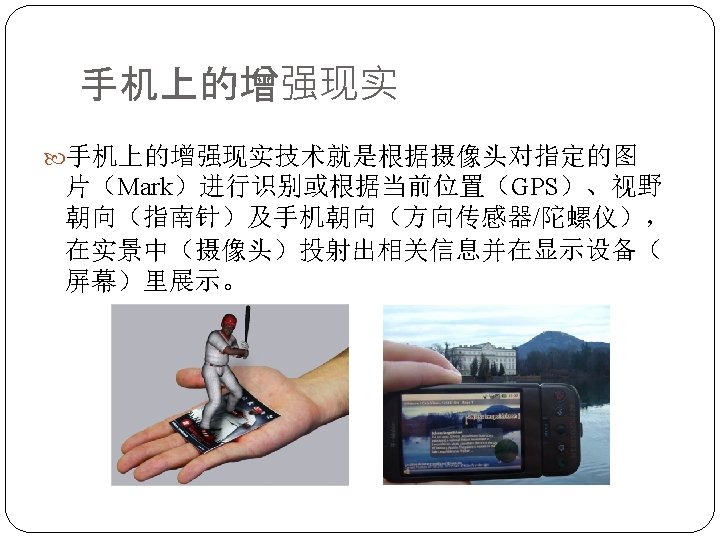
增强现实 68 CV: Calibration 2021/2/20

增强现实的开发 具 ARTOOLKIT http: //www. hitl. washington. edu/artoolkit/ 视+AR app http: //www. sightp. com/view/downloadapp. html 高通Vuforia SDK 6. 2 https: //developer. vuforia. com/downloads/sdk 70 CV: Calibration 2021/2/20

增强现实的开发 具 视+AR app 71 CV: Calibration 2021/2/20

增强现实的开发 具 视+AR app 72 CV: Calibration 2021/2/20

增强现实的开发 具 Vuforia SDK 6. 2 73 CV: Calibration 2021/2/20
- Slides: 73