Biomehanika Prof dr sc Dario Faj 2019 Biomehanika

Biomehanika Prof. dr. sc. Dario Faj 2019

Biomehanika Dio fizike koji izučava mehanička svojstva i zakone kretanja živih sistema: – Kinematika i dinamika zdravog i bolesnog čovjeka – Mehanička svojstva tkiva i organa – Biomehanički sistemi u cilju rješavanja problema u tehnici

Biomehanika koristi zakone fizike i inženjerske koncepte za objašnjavanje kretanja živih bića, dijelova tijela, unutarnje i vanjske sile koje djeluju na tijelo i dijelove tijela tijekom različitih aktivnosti

Ciljevi biomehanike I Određivanje sila koje djeluju na mišiće, tetive, kosti i zglobove zbog međudjelovanja s vanjskim silama Određivanje sila kojima mišići djeluju na dijelove tijela Te sile se tada koriste za određivanje mogućnosti ozljeda i savjete o smanjenju mogućnosti ozljede

Ciljevi biomehanike II Sportska biomehanika istažjue odnose između gibanja tijela, unutarnjih i vanjskih sila koje djeluju na dijelove tijea radi optimizacije pokreta i postizanja boljih rezultata uz manju mogućnost ozljede – uspjeh i smanjenje vjerojatnosti ozljede ovise o tehnici

Ciljevi biomehanike III Kako dijelovi tijela imaju određena mehanička svojstva, fizikalni modeli koriste se za ispitivanje tih svojstava i izdržljivosti dijelova tijela na djelovanje sila S druge strane, postojeći biomehanički sistemi i način kretanja koriste se za rješavanje problema u tehnici

Područje primjene biomehaničkih sustava za 3 D analizu pokreta Medicinske znanosti - Biomehanička istraživanja - Analiza hoda & Rehabilitacija - Postura, Ravnoteža & Motorička kontrola - Sportska izvedba

Izrada proteza Unaprjeđivanje pokreta u sportu

Who Uses Biomechanics? Physical Education Teachers Coaches Athletes Personal Trainers Athletic Trainers Physicians Physical Therapists Occupational Therapists Engineers Researchers

What is Biomechanics Used For? - Improving Sports Performance - Better technique & training - Better equipment (e. g. klapskates) - Sports Injury Prevention - Identifying safer techniques - Training to reduce risk of injury - Developing protective equipment (e. g. knee brace) - Occupational Injury Prevention (e. g. low back pain, carpal tunnel syndrome) - Injury Rehabilitation (identify what activities to include in rehab protocol, identify when it is safe to return to activity) - Improving Physical Function(e. g. surgery planning in cerebral palsy) - Musculoskeletal Health (e. g. reducing injurious falls by older adults) - Product Design (e. g. athletic shoes) - Forensic Biomechanics (e. g. accident investigation)

Povijest

ELEMENTI LOKOMOTORNOG SUSTAVA čovjekov zglobnokoštano-mišićni sustav koji mu omogućuje promjenu položaja u prostoru i sve ostale voljne mehaničke pokrete. Sastoji se od pasivnog i aktivnog dijela – pasivni dio čine kosti i zglobovi – aktivni dio skeletni mišići.

Sile na tijelo Vanjske – najčešće gravitacijska Unutrašnje – posljedica mišićnih kontrakcija i prenose se neposredno na kosti skeleta. Zbog toga se kosti pokoravaju zakonima poluge. Zglobovi povezuju ovakve poluge u sisteme.

Zglobovi Zglob predstavlja spoj dvije ili više kosti – Jednoosni Dvoosni

Zglobovi – Višeosni – rotacija oko više osi

Sadržaj predmeta: U ovisnosti o razini biomehaničkog modeliranja moguće je primijeniti složene matematičke modele Ipak, i jednostavniji modeli kojima ćemo se služiti u ovom predmetu mogu pomoći u razumijevanju pokreta ljudskog tijela, opterećenja dijelova tijela i odupiranju dijelova tijela deformaciji
")
Biomehanika: fizikalni zakoni: sadržaj Gibanja – možemo promatrati tijelo kao točku (aproksimiramo centrom mase) ili kao tijelo s dimenzijama Sile Moment sila Djelovanja sile na čvrsto tijelo (bez deformiranja tijela) Jednostavni fizikalni modeli (poluge u tijelu)

Biomehanika: fizikalni zakoni Primjeri složenijih fizikalnih modela u tijelu Djelovanje sile na čvrsto tijelo uz deformaciju tijela Mehanički modeli deformacije tkiva i organa
 deformacija")
DJELOVANJE SILE NA ČVRSTO TIJELO translacija ili rotacija promjena vanjske energije (potencijalne, kinetičke) deformacija promjena unutrašnje energije (potencijalne)

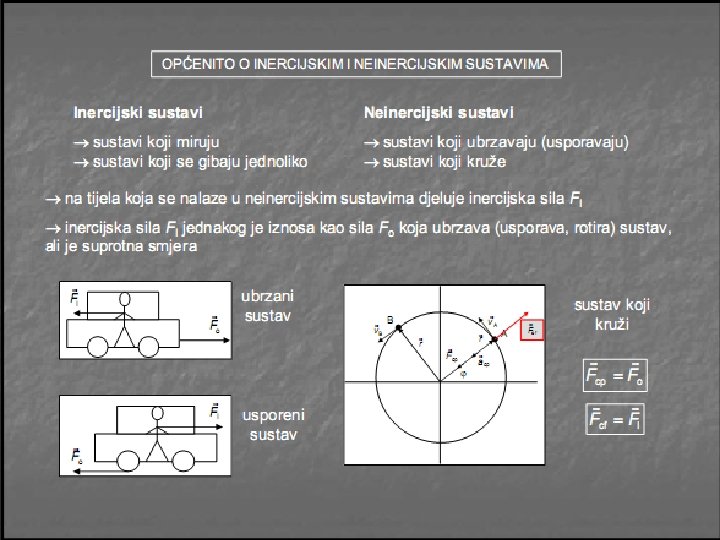
Newtonovi zakoni gibanja I zakon Kad je rezultanta sila koje djeluju na tijelo jednaka nuli, ne mijenja brzina tijela. To znači da ono miruje ili se giba jednoliko po se pravcu. se odupire promjeni brzine - zakon inercije koji definira tromu Tijelo masu tijela.

II zakon Djelovanje sile na tijelo uzrokuje promjenu količine gibanja jednadžba gibanja; nerelativistička aproksimacija ako je sila stalna tijelo se giba jednoliko ubrzano

III zakon - međudjelovanje dva tijela sila i protusila imaju hvatišta u dva različita tijela i nalaze se na istom pravcu nosiocu 1 2

krak sile Moment sile O hvatište sile . . Moment sile koja djeluje na tijelo koje je učvršćeno u jednoj točki - osi O uzrokuje rotaciju tijela Moment sile je vektor okomit na silu i na krak; iznos mu je jednak površini paralelograma što ga razapinju sila i krak

Ako na tijelo djeluje više sila, momente tih sila možemo definirati prema odabranoj istoj točki. To ne mora biti os rotacije, ali najčešće je praktično izabrati baš tu točku. Krak sile je udaljenost od izabrane točke do hvatišta sile. Ako je krak okomit na silu onda je iznos momenta sile jednak samo umnošku kraka i sile (sin 90° = 1)

Poluga protusila uvjet translacijske ravnoteže O uvjet rotacijske ravnoteže vanjske sile

Poluge u ljudskom tijelu aktivna sila mišića Fm ; krak km sila tereta Ft ; krak kt efikasnost poluge < 1 poluge ravnoteže (primjer glava) > 1 poluge snage (primjer stopalo) << 1 poluge brzine (primjer podlaktica)

Poluga kao crna kutija Promatrajući polugu kao sistem tada je funkcija prijenosa sistema: – Ft = η * Fm – Pokazuje kako se ulazna sila Fm prenosi do izlaza (Ft)

PRIMJERI POLUGA U TIJELU Ft M> G FFm Fm FFm mm ravnoteže Fm M<G M >> G Ft Ft snage brzine Samo za najjednostavnije pokrete.

Model glave os poluge je na spojnici nos–uho, bliže uhu težište glave je u prednjem dijelu lubanje a hvatište mišića koji podižu glavu je u stražnjem dijelu krak mišića kraći je oko 3 puta od kraka tereta aktivna sila mišića je veća od sile tereta glava je poluga ravnoteže

Model stopala os poluge stopala je u korijenu prstiju hvatište sile tereta je skoro u sredini stopala hvatište mišića potkoljenice koji dižu stopalo je blizu skočnog zgloba - krak mišićne sile je barem dvostruko duži od kraka tereta aktivna sila mišića je manja od sile tereta stopalo je poluga snage
 od hvatišta mišića nadlaktice vrlo je mala duljina")
Model podlaktice udaljenost osi (lakatnog zgloba) od hvatišta mišića nadlaktice vrlo je mala duljina kraka tereta, od lakatnog zgloba do šake je velika aktivna sila mišića znatno je veća od sile tereta brzina pokretanja tereta je velika podlaktica je poluga brzine u razvoju čovjeka brzina je bila važnija od snage

Zadatak m = 70 kg Izračunajte silu F kontrakcije u gastroknemijusu. F· 0, 2 - G· 0, 16 = 0

SISTEM POLUGA U prirodnim uvjetima kretanja, kontrakcija jednog mišića ili mišićne grupe izaziva istovremeno pomicanje bar dva zglobom povezana dela => – Opis kretanja modelom sistema poluga

Sistem poluga - model Pri prijelazu iz čučnja u stojeći položaj – model: sistem čine natkoljenica i potkoljenica povezane jednoosnim zglobom koljena Kontrakcija mišića -sila

Model prijelaza iz čučnja u stojeći položaj Dvije poluge AO i OB Iste duljine s Sistem fiksiran u točki A radi jednostavnosti Za kraj poluge BO čvrsto vezan kolotur polumjera r U točki B djeluje sila uzrokovana polovicom mase tijela Mišićna kontrakcija zamijenjena povlačenjem niti kroz oba kolotura

Model prijelaza iz čučnja u stojeći položaj Ako se na slobodni kraj niti djeluje silom F, sistem poluga podiže teret (kut Θ se povećava) Sila F koja djeluje u točki C savladava silu F’ i koristi se za podizanje tijela Promatramo samo polugu OB koja se rotira oko točke O Poluga brzine: – sila mišića je sila F, krak r – sila tereta je sila F‘, krak DO

Model prijelaza iz čučnja u stojeći položaj Poluga OB će biti u ravnoteži (pa i cijeli sistem za: Tražena sila mišića: => možemo posrednim putem naći maksimalnu silu mišića koju netko može postići

Model prijelaza iz čučnja u stojeći položaj Koeficijent efikasnosti poluge: =>ovisnost koeficijenta prijenosa o kutu Θ
 s kutem Θ")
Model prijelaza iz čučnja u stojeći položaj Koeficijent efikasnosti raste (nelinearno) s kutem Θ Poluga brzine (k<<1), Kada Θ pređe 160˚, poluga postaje poluga snage?

ZADATAK Sportaš drži loptu mase 0, 5 kg u šaci dok mu je podlaktica u horizontalnom položaju. Pretpostavite kako je mišić bicepsa vezan za podlakticu na mjestu koje je 3 cm od središta lakatnog zgloba, a da se središte lopte nalazi 35 cm od središta lakta. Pretpostavite kako je masa podlaktice skupa sa šakom 2 kg, a da se težište nalazi na udaljenosti 20 cm od zgloba lakta. Odredite iznos sile u mišiću bicepsa (F) i iznos sile pritiska u zglobu lakta (FN).

F Fn Gr Gt FN – sila pritiska u zglobu lakta F – sila mišića, bicepsa l. F – krak sile mišića GR - težina ruke l. G – krak težine GT – težina tereta l. T – krak tereta

os rotacije je središte zgloba u laktu kako podlaktica ne vrši rotaciju zbroj svih momenata mora biti jednak nuli: M – MR – MT = 0 Fl. F - GRl. G - GTl. T= 0 • zglob lakta oko kojeg smo pretpostavili rotaciju ne giba se ubrzano pa vrijedi da je suma svih sila koje djeluju na sustav podlaktice jednaka nuli: F – F N – GR – GT = 0

Gibanje hodanje – trenje između stopala i podloge na stopalo u dodiru s podlogom djeluje sila trenja i sila podloge (reakcija na težinu tijela); rezultantne sile u oba stopala su na cijelo tijelo djeluju rezultantne sile u stopalima i težina tijela sila uzrokuje horizontalno gibanje cijelog tijela naprijed

Prikaz sila na tijelo kod hodanja R 2 Ftr Fn Fn R 1 Ftr

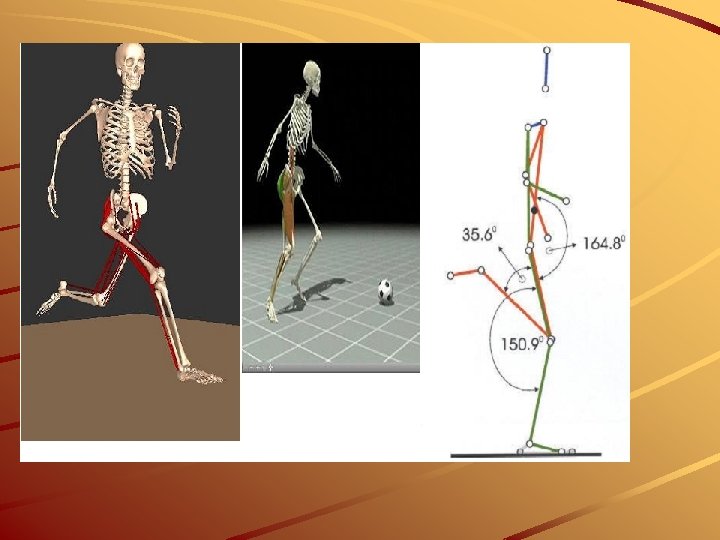
Normalni hod http: //www. frontiernet. net/~imaging/gait_mo del. html

Opis normalnog hoda stopalo noge u zraku spušta se na podlogu prije nego se drugo odvoji - faza oslonca na obje noge dvonožni hod - visoko smješteno težište, opterećenje kralježnice naizmjenični gubitak i uspostavljanje ravnoteže faza njihanja - zglob kuka kod iskoraka djeluje samo u početku pokreta, ostalo je slobodno njihanje
 H")
Vertikalni skok (skok s mjesta) H

na skakača djeluje sila podloge i njegova težina ubrzanje na putu h: brzina na visini h: duž puta H nakon odvajanja od podloge brzina je maksimalna visina vertikalnog skoka, v’=0:
 Skok preko šipke na istočnjački način podizanje težišta Skok")
Skok uvis (skok sa zaletom) Skok preko šipke na istočnjački način podizanje težišta Skok preko šipke na zapadnjački način

školski stil današnji atletski stil
- Slides: 53