Biomedical Instrumentation Chapter 6 in Introduction to Biomedical

Biomedical Instrumentation Chapter 6 in Introduction to Biomedical Equipment Technology By Joseph Carr and John Brown

Signal Acquisition l Medical Instrumentation typically entails monitoring a signal off the body which is analog, converting it to an electrical signal, and digitizing it to be analyzed by the computer.

Types of Sensors: l Electrodes: acquire an electrical signal l Transducers: acquire a non-electrical signal (force, pressure, temp etc) and converts it to an electrical signal

Active vs Passive Sensors: l Active Sensor: • Requires an external AC or DC electrical source to power the device • Strain gauge, blood pressure sensor l Passive Sensor: • Provides it own energy or derives energy from phenomenon being studied • Thermocouple

Sensor Error Sources l Error: • Difference between measured value and true value.

5 Categories of Errors: 1. 2. 3. 4. 5. Insertion Error Application Error Characteristic Error Dynamic Error Environmental Error

Insertion Error: • Error occurring when inserting a sensor

Application Error: • Errors caused by Operator

Characteristic Error: • Errors inherent to Device

Dynamic Error: • Most instruments are calibrated in static conditions if you are reading a thermistor it takes time to change its value. If you read this value to quickly an error will result.

Environmental Error: • Errors caused by environment • heat, humidity

Sensor Terminology l Sensitivity: • Slope of output characteristic curve Δy/ Δx; • Minimum input of physical parameter will create a detectable output change • Blood pressure transducer may have a sensitivity of 10 u. V/V/mm. Hg so you will see a 10 u. V change for every V or mm. Hg applied to the system.

Output Input Which is more sensitive? The left side one because you’ll have a larger change in y for a given change in x

Sensor Terminology l Sensitivity Error = Departure from ideal slope of a characteristic curve Output Ideal Curve Input Sensitivity Error

Sensor Terminology l Range = Maximum and Minimum values of applied parameter that can be measured. • If an instrument can read up to 200 mm. Hg and the actual reading is 250 mm. Hg then you have exceeded the range of the instrument.

Sensor Terminology l l l Dynamic Range: total range of sensor for minimum to maximum. Ie if your instrument can measure from -10 V to +10 V your dynamic range is 20 V Precision = Degree of reproducibility denoted as the range of one standard deviation σ Resolution = smallest detectable incremental change of input parameter that can be detected

Accuracy l Accuracy = maximum difference that will exist between the actual value and the indicated value of the sensor Xi Xo

Offset Error l Offset error = output that will exist when it should be zero • The characteristic curve had the same sensitive slope but had a y intercept Output Input Zero offset error Input Offset Error

Linearity l Linearity = Extent to which actual measure curved or calibration curve departs from ideal curve.
 = (Din(Max) / INfs) * 100% • Nonlinearity is percentage")
Linearity l Nonlinearity (%) = (Din(Max) / INfs) * 100% • Nonlinearity is percentage of nonlinear • Din(max) = maximum input deviation • INfs = maximum full-scale input Full Scale Input eal Id Output Din(Max) e r u as Me Input

Hysteresis l Hysteresis = measurement of how sensor changes with input parameter based on direction of change
, F")
Hysteresis l The value B can be represented by 2 values of F(x), F 1 and F 2. If you are at point P then you reach B by the value F 2. If you are at point Q then you reach B by value of F 1. Output = F(x) P F 2 Input = x F 1 B Q

Response Time l Response Time: Time required for a sensor output to change from previous state to final settle value within a tolerance band of correct new value denoted in red can be different in rising and decaying directions F(t) 100% 70% Tresponse Tolerance Band Rising Response Time Ton Time

Response Time l Time Constant: Depending on the source is defined as the amount of time to reach 0% to 70% of final value. Typically denoted for capacitors as T = R C (Resistance * Capacitance) denoted in Blue F(t) 100% 70% Tresponse Tolerance Band Rising Response Time Ton Time
 Tdecay Decaying Response Time Toff l Time Convergence Eye Movement the")
Response Time F(t) Tdecay Decaying Response Time Toff l Time Convergence Eye Movement the inward turning of the eyes have a different response time than divergence eye movements the outward turning of the eyes which would be the decay response time

Dynamic Linearity Measure of a sensor’s ability to follow rapid changes in the input parameters. Difference between solid and dashed curves is the nonlinearity as depicted by the higher order x terms F(x)* = ax + bx 2+cx 4+. . . +K Output F(x) K = ) x ( K + x m F F(x)* = ax + bx 3+cx 5+. . . +K Output F(x) K Input X = ) x ( K + x m F Input X
 != |F(-x)| where F(x)* is asymmetric around")
Dynamic Linearity l l Asymmetric = F(x) != |F(-x)| where F(x)* is asymmetric around linear curve F(x) then F(x) = ax + bx 2+cx 4+. . . +K offsetting for K or you could assume K = 0 Symmetrical = F(x) = |F(-x)| where F(x) * is symmetric around linear curve F(x) then F(x) = ax +bx 3 + cx 5 +. . . + K offsetting for K or you could assume K =0

Frequency Response of Ideal and Practical System l When you look at the frequency response of an instrument, ideally you want a wideband flat frequency response. Av Av = Vo/Vi 1. 0 Frequency (w) radians per second

Frequency Response of Ideal and Practical System l In practice, you have attenuation of lower and higher frequencies Av Av = Vo/Vi 1. 0 0. 707 FL FH Frequency (w) radians per second l FL and FH are known as the – 3 d. B points in voltage systems.

Examples of Filters l l l Ideal Filter has sharp cutoffs and a flat pass band Most filters attenuate upper and lower frequencies Other filters attenuate upper and lower frequencies and are not flat in the pass band

Electrodes for Biophysical Sensing l Bioelectricity: naturally occurring current that exists because living organisms have ions in various quantities

Electrodes for Biophysical Sensing l Ionic Conduction: Migration of ionspositively and negatively charge molecules throughout a region. • Extremely nonlinear but if you limit the region can be considered linear

Electrodes for Biophysical Sensing l Electronic Conduction: Flow of electrons under the influence of an electrical field

Bioelectrodes l Bioelectrodes: class of sensors that transduce ionic conduction to electronic conduction so can process by electric circuits • Used to acquire ECG, EEG, EMG, etc.
 outside body • Indwelling")
Bioelectrodes l 3 Types of electrodes: • Surface (in vivo) outside body • Indwelling Macroelectrodes (in vivo) • Microelectrodes (in vitro) inside body

Bioelectrodes l Electrode Potentials: • Skin is electrolytic and can be modeled as electrolytic solutions Metal Electrode Electrolytic Solution where Skin is electrolytic and can be modeled as saline

Electrodes in Solution l Have metallic electrode immersed in electrolytic solution once metal probe is in electrolytic solution it: 1. Discharges metallic ions into solution 2. Some ions in solution combine with metallic electrodes 3. Charge gradient builds creating a potential difference or you have an electrode potential or ½ cell potential

Electrodes in Solution A ++ B +++ 2 cells A and B, A has 2 positive ions And B has 3 positive ions thus have a Potential difference of 3 – 2 = 1 where B is more positive than A

Electrodes l Two reactions take place at electrode/electrolyte interface: • Oxidizing Reaction: Metal -> electrons + metal ions • Reduction Reaction : Electrons + metal ions -> Metal

Electrodes l Electrode Double Layer: formed by 2 parallel layers of ions of opposite charge caused by ions migrating from 1 side of region or another; ionic differences are the source of the electrode potential or half-cell potential (Ve). Metal A Vae Vbe Electrolytic Solution Metal B

Electrodes l If metals are different you will have differential potential sometimes called an electrode offset potential. • Metal A = gold Vae = 1. 50 V and Metal B = silver Vbe = 0. 8 V then Vab = 1. 5 V – 0. 8 V = 0. 7 V (Table 6 -1 in book page 96) Metal A Vae Vbe Electrolytic Solution Metal B

Electrodes l Two general categories of material combinations: • Perfectly polarized or perfectly nonreversible electrode: no net transfer of charge across metal/electrolyte interface • Perfectly Nonpolarized or perfectly reversible electrode: unhindered transfer of charge between metal electrode and the electrode • Generally select a reversible electrode such as Ag-Ag. Cl (silver-silver chloride)

Electrode A Cellular Resistance Cellular Potentials Rsa Rc Mass Tissue Resistance Vd + Rsb Ionic Conduction l l R 1 a Rt Electrode B l C 1 a Vea - + Rt= internal resistance of body which is low Vd = Differential voltage Vd Rsa and Rsb = skin resistance at electrode A and B C 1 b Vo Veb - + R 1 b Electronic Conduction • R 1 A and R 1 B = resistance of electrodes • C 1 A and C 1 B = capacitance of electrodes

Electrode Potentials cause recording Problems l l ½ cell potential ~ 1. 5 V while biopotentials are usually 1000 times less (ECG = 1 -2 m. V and EEG is 50 u. V) thus have a tremendous difference between DC cell potential and biopotential Strategies to overcome DC component • • • Differential DC amplifier to acquire signal thus the DC component will cancel out Counter Offset-Voltage to cancel half-cell potential AC couple input of amplifier (DC will not pass through) ie capacitively couple the signal into the circuit

Electrode Potentials cause recording Problems l Strategies to overcome DC component • Differential DC amplifier to acquire signal thus • • the DC component will cancel out Counter Offset-Voltage to cancel half-cell potential AC couple input of amplifier (DC will not pass through) • Capacitively couple the signal into the circuit

Medical Surface Electrodes l l l Typical Medical Surface Electrode: Use conductive gel to reduce impedance between electrode and skin Schematic: Pin-Tip Connector Binding Spot Shielded Wire Electrode Surface

Medical Surface Electrodes l Have an Ag-Ag. Cl contact button at top of hollow column filled with gel • Gel filled column holds actual metallic electrode off surface of skin and decreases movement artifact • Typical ECG arrangement is to have 3 ECG electrodes (2 differentials signals and a reference electrode)

Problems with Surface Electrodes 1. Adhesive does not stick for a long time on sweaty skin 2. Can not put electrode on bony prominences 3. Movement or motion artifact significant problem with long term monitoring results in a gross change in potential 4. Electrode slippage if electrode slips then thickness of jelly changes abruptly which is reflected as a change in electrode impedance and electrode offset potential (slight change in potential)

Potential Solutions for Surface Electrodes Problems 1. Additional Tape 2. Rough surface electrode that digs past scaly outer layer of skin typically not comfortable for patients.

Other Types of Electrodes l l Needle Electrodes: inserted into tissue immediately beneath skin by puncturing skin on an angle note infection is a problem. Indwelling Electrodes: Inserted into layers beneath skin -> typically tiny exposed metallic contact at end of catheter usually threaded through patient’s vein to measure intracardiac ECG to measure high frequency characteristics such as signal at the bundle of His

Other Types of Electrodes l EEG Electrodes: can be a needle electrode but usually a 1 cm diameter concave disc of gold or silver and is held in place by a thick paste that is highly conductive sometimes secured by a headband

Microelectrode l Microelectrode: measure biopotential at cellular level where microelectrode penetrates cell that immersed in an infinite fluid • Saline.

Microelectrode l Two typical types: 1. Metallic Contact 2. Fluid Filled

Microelectrode Equivalent Circuit R 1 RS V 1 C 2 Vo RS = Spreading Resistance of the electrode and is a function of tip diameter R 1 and C 1 are result of the effects of electrode/cell interface C 2 = Electrode Capacitance

Calculation for Resistance Rs Rs in metallic microelectrodes without glass coating: where Rs = resistance ohms (Ώ) P = Resistivity of the infinite solution outside electrode = 70 Ώcm for physiological saline r = tip radius ( ~0. 5 um for 1 um electrode) = 0. 5 x 10 -4 cm

Calculation for Resistance Rs l Rs of glass coated metallic microelectrode is 1 -2 order of magnitude higher: where Rs = resistance ohms (Ώ) P = Resistivity of the infintie solution outside electrode) = 3. 7 Ώcm for 3 M KCl r = tip radius typically 0. 1 u m = 0. 1 x 10 -4 cm a = taper angle (~ p/ 180)

Capacitance of Microelectrode Capacitance of C 2 has units p. F/cm Where e = dielectric constant which for glass = 4 R = outside tip radius r = inside tip radius

Capacitance of Microelectrode l Find C of glass microelectrode if the outer radius is 0. 2 um and the inner radius = 0. 15 um

Transducers and other Sensors l Transducers: sensors and are defined as a device that converts energy from some one form (temp. , pressure, lights etc) into electrical energy where as electrodes directly measure electrical information

Wheatstone Bridge A R 1 Es + - R 3 + Eo - EC Es ED EC R 2 + Eo - ED R 4 B l Basic Wheatstone Bridge uses one resistor in each of four arms where battery excites the bridge connected across 2 opposite resistor junctions (A and B). The bridge output Eo appears across C and D junction.

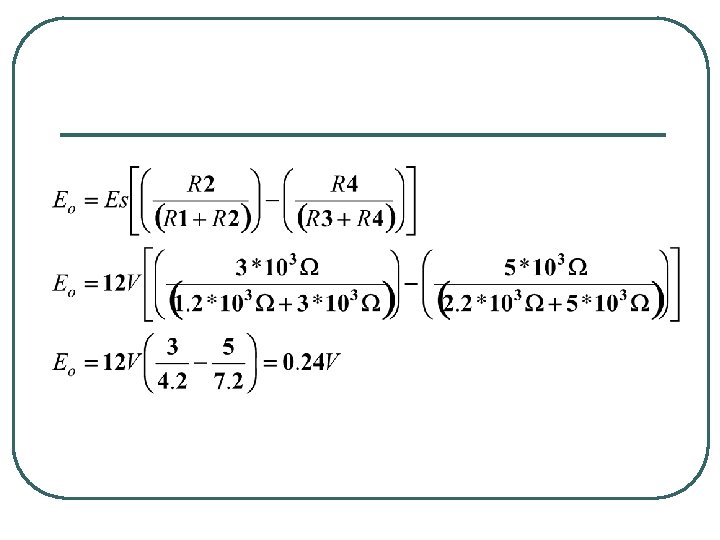
Finding output voltage to a Wheatstone Bridge l Ex: A wheatstone bridge is excited by a 12 V dc source and has the following resistances R 1 = 1. 2 KΏ R 2 = 3 K Ώ R 3 = 2. 2 K Ώ; and R 4 = 5 K Ώ; find Eo

Finding output voltage to a Wheatstone Bridge l A wheatstone bridge is excited by a 12 V dc source and has the following resistances R 1 = 1. 2 KΏ R 2 = 3 K Ώ R 3 = 2. 2 K Ώ; and R 4 = 5 K Ώ; find Eo

Null Condition of Wheatstone Bridge l Null Condition is met when Eo = 0 can happen in 2 ways: • Battery = 0 (not desirable) • R 1 / R 2 = R 3/ R 4

Null Condition of Wheatstone Bridge l When R 1 = 2 KΏ; R 2 = 1 K Ώ; R 3 = 10 K Ώ; R 4 = 5 K Ώ

Null Condition of Wheatstone Bridge l Key with null condition is if you change one of the resistances to be a transducer that changes based on input stimulus then Eo will also change according to input stimulus

Strain Gauges l Definition: resistive element that changes resistance proportional to an applied mechanical strain

Strain Gauges l Compression = decrease in length by DL and an increase in cross sectional area. L = length Rest Condition L - DL = length Compression

Strain Gauges l Tension = increase in length by DL and a decrease in cross section area. L = length L + DL = length Rest Condition Tension

Resistance of a metallic bar is given in length and area • where • R = Resistance units = ohms (Ώ) • ρ = resistivity constant unique to type of material used in bar units = ohm meter (Ώm) • L = length in meters (m) • A = Cross sectional area in meters 2 (m 2 )

Resistance of a metallic bar is given in length and area l Example: find the resistance of a copper bar that has a cross sectional area of 0. 5 mm 2 and a length = 250 mm note the resistivity of copper is 1. 7 x 10 -8Ώm

Piezoresistivity l Piezoresistivity = change in resistance for a given change in size and shape denoted as h l Resistance in tension = l Resistance increases in tension L = length; ΔL = change in L; ρ = resistivity A = Area; ΔA = change in A

l Resistance in compression = l Resistance decreases in compression L = length; ΔL = change in L; ρ = resistivity A = Area; ΔA = change in A Note: Textbook forgot the ρ in equations 6 -28 and 6 -29 on page 110

Example of Piezoresistivity l l l Thin wire has a length of 30 mm and a cross sectional area of 0. 01 mm 2 and a resistance of 1. 5Ώ. A force is applied to the wire that increases the length by 10 mm and decreases cross sectional area by 0. 0027 mm 2 Find the change in resistance h. • Note: ρ = resistivity = 5 x 10 -7 Ώm

Example of Piezoresistivity

Example of Piezoresistivity l l Note: Change in Resistance will be approximately linear for small changes in L as long as ΔL<<L. If a force is applied where the modulus of elasticity is exceeded then the wire can become permanently damaged and then it is no longer a transducer.
 = a method of comparing one transducer to")
Gauge Factor l Gauge Factor (GF) = a method of comparing one transducer to a similar transducer

Gauge Factor l where • GF = Gauge Factor unitless • ΔR = change in resistance ohms (Ώ) • R = unstrained resistance ohms (Ώ) • ΔL = change in length meters (m) • L = unstrained length meters (m)

Gauge Factor • Where ε strain which is unitless l GF gives relative sensitivity of a strain gauge where the greater the change in resistance per unit length the greater the sensitivity of element and the greater the gauge factor.

Example of Gauge Factor l l l Have a 20 mm length of wire used as a string gauge and has a resistance of 150 Ώ. When a force is applied in tension the resistance changes by 2Ώ and the length changes by 0. 07 mm. Find the gauge factor:

Types of Strain Gauges: Unbonded and Bonded l Unbonded Strain Gauge : resistance element is a thin wire of special alloy stretch taut between two flexible supports which is mounted on flexible diaphram or drum head.

Types of Strain Gauges: Unbonded and Bonded l l When a Force F 1 is applied to diaphram it will flex in a manner that spreads support apart causing an increase in tension and resistance that is proportional to the force applied. When a Force F 2 is applied to diaphram the support ends will more close and then decrease the tension in taut wire (compression force) and decrease resistance will decrease in amount proportional to applied force

Types of Strain Gauges: Unbonded and Bonded l Bonded Strain Gauge: made by cementing a thin wire or foil to a diaphragm therefore flexing diaphragm deforms the element causing changes in electrical resistance in same manner as unbonded strain gauge

Types of Strain Gauges: Unbonded and Bonded l l When a Force F 1 is applied to diaphram it will flex in a manner that causes an increase in tension of wire then the increase in resistance is proportional to the force applied. When a Force F 2 is applied to diaphram that cause a decrease the tension in taut wire (compression force) then the decrease in resistance will decrease in amount proportional to applied force

Comparison of Bonded vs. Unbonded Strain Gauges 1. Unbonded strain gauge can be built where its linear over a wide range of applied force but they are delicate 2. Bonded strain gauge are linear over a smaller range but are more rugged • Bonded strain gauges are typically used because designers prefer ruggedness.

Typical Configurations A R 1 = SG 1 ES + - R 3 = SG 3 Vo C R 2 = SG 2 B Electrical Circuit l D R 4 = SG 4 Mechanical Configuration 4 strain gauges (SG) in Wheatstone Bridge:

Strain Gauge Example l l + l Using the configuration in the previous slide where 4 strain gauges are placed in a wheatstone bridge where the bridge is balanced when no force is applied, Assume a force is applied so that R 1 and R 4 are in tension and R 2 and R 3 are in compression. Derive the equation to depict the change in voltage across the bridge and find the output voltage when each resistor is 200 Ώ, the change of resistance is 10 Ώ and the source voltage is 10 V

Strain Gauge Example Derivation: Circuit A R 1 = R +h Es + C + R 2 = R - h R 3= R-h Eo B - D R 4 = R +h Note: Text book has wrongly stated that tension decreases R and compression increases R on page 112

Transducer Sensitivity l Transducer Sensitivity = rating that allows us to predict the output voltage from knowledge of the excitation voltage and the value of the applied stimulus units = μV/V*unit of applied stimulus

Transducer Sensitivity l Example if you have a force transducer calibrated in grams (unit of mass) which allows calibration of force transducer then sensitivity denoted as φ = μV/V*g (another ex φ = μV/V*mm. Hg)

Transducer Sensitivity l To calculate Output Potential use the following equations: • where • Eo = output potential in Volts (V) • E = excitation voltage • φ = sensitivity μV/V*g • F = applied force in grams (g)

Transducer Sensitivity l Example: Transducer has a sensitivity of 10 μV/V*g, predict the output voltage for an applied force of 15 g and 5 V of excitation. • note book has typo where writes μV/V/g for sensitivity

Inductance Transducers l Inductance Transducers: inductance L can be varied easily by physical movement of a permeable core within an inductor 3 basic forms: • Single Coil • Reactive Wheatstone Bridge • Linear Voltage Differential Transformer LVDT:

LVDT: Diaphragm AC Excitation L 1 Core L 2 L 3 Axis of Motion External Load

Capacitance Transducers l l Quartz Pressure Sensors: capacitively based where sensor is made of fused quartz Capacitive Transducers: Capacitance C varies with stimulus

Capacitive Transducers: l Three examples: • Solid Metal disc parallel to flexible metal diaphragm • • separated by air or vacuum (similar to capacitor microphone) when force is applied they will move closer or further away. Stationary metal plate and rotating moveable plate: as you rotate capacitance will increase or decrease Differential Capacitance: 1 Moveable metal Plate placed between 2 stationary Places where you have 2 capacitors: C 1 between P 1 and P 3 and C 2 between P 2 and P 3 where when a force is applied to diaphragm P 3 moves closer to one plate or vice versa

Temperature Transducers l 3 Common Types: • Thermocouples • Thermistors • Solid State PN Junctions

Thermocouple: l l Thermocouple: 2 dissimilar conductor joined together at 1 end. The work functions of the 2 materials are different thus a potential is generated when junction is heated (roughly linear over wide range)

Thermistors: l Thermistors: Resistors that change their value based on temperature where • Positive Temperature Coefficient (PTC) device will • • increase its resistance with an increase in temperature Negative Temperature Coefficient (NTC) device will decrease its resistance with an increase in temperature Most thermistors have nonlinear curve when plotted over a wide range but can assume linearity if within a limited range

BJT = Bipolar Junction Transistor l Transistor = invented in 1947 by Bardeen, Brattain and Schockley of Bell Labs. IC + IB B = Base C = Collector E = Emitter IE = I B + I C VCB + VBE IE + VCE -

BJT = Bipolar Junction Transistor l Transistor rely on the free travel of electrons through crystalline solids called semiconductors. Transistors usually are configured as an amplifier or a switch. ”

Solid State PN Temperature Transducers Solid State PN Junction Diode: the base emitter voltage of a transistor is proportional to temperature. For a differential pair the output voltage is: VCC+ + VCB + VBE ccs 1 K = Boltzman’s Constant = 1. 38 x 10 -23 J/K T = Temperature in Kelvin IC 1 = Collector current of BJT 1 m. A IC 2 = Collector current of BJT 2 m. A q = Coulomb’s charge = 1. 6 x 10 -19 coulombs/electron Ic 1 Ic 2 DVBE VEE- + VCB + VBE ccs 2

Example of temperature transducer l Find the output voltage of a temperature transducer in the previous slide if IC 1 = 2 m. A; IC 2 = 1 m. A and the temperature is 37 o. C

Homework l l Read Chapter 7 Chapter 6 Problems: 1, 3 to 6, 9 • Problem 1: resistivity = 1. 7 * 10 -8Ώm • Problem 4: sensitivity = 50 μV/(V*mm. Hg) • Problem 4: 1 torr = 1 mm. Hg • Problem 6: sensitivity = 50 μV/(V*g)

Review l l l l l What are two types of sensors? List 5 categories of error How do we quantify sensors? What is an electrode? How do you calculate Rs and C 2 of a microelectrode that is metal with and without glass coating? What is a transducer? What is a Wheatstone Bridge? How do you derive the output voltage Find resistance of a metallic bar for a given length and area How does resistance change in tension and in compression and how do you calculate resistance

Review l l l How do you find resistance change in piezoresistive device How do you determine gauge factor What is the definition of a strain gauge and what is difference between bonded and unbonded strain gauge. Determine the output potential given a transducer’s sensitivity. What are inductance, capacitance, and temperature transducers? How do you calculate the temperature for a solid state PN Junction Diode?
- Slides: 106