Berth and quay crane allocation as a scheduling

Berth and quay crane allocation as a scheduling problem J. Błażewicz, M. Machowiak Institute of Computing Science, Poznan University of Technology, C. Oğuz, Department of Industrial Engineering, Koç University, Istanbul T. C. E. Cheng Hongkong Polytechnic University

Recent survey n Bierwirth, Meisel, EJOR 2009 Berth allocation problem - BAP gives rise to: Quay crane assignment problem - QCAP Quay crane scheduling problem - QCSP

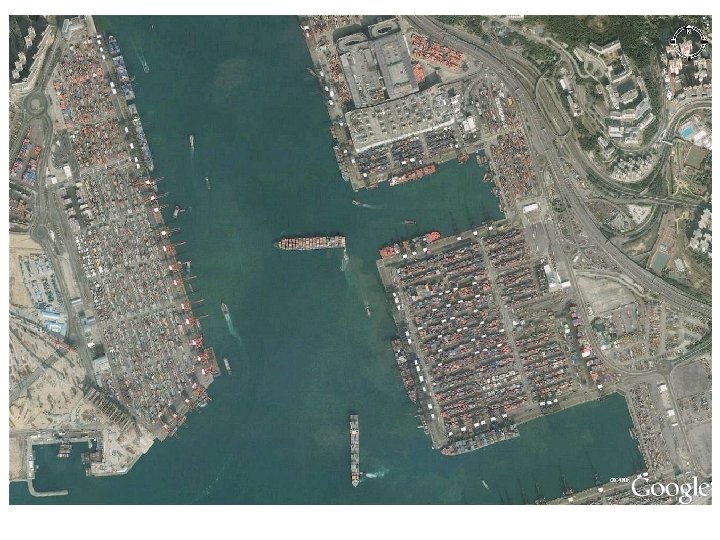
Planning problems in container terminals
, assignment of cranes to vessels (b)")
Space-time representation of a berth plan (a), assignment of cranes to vessels (b)

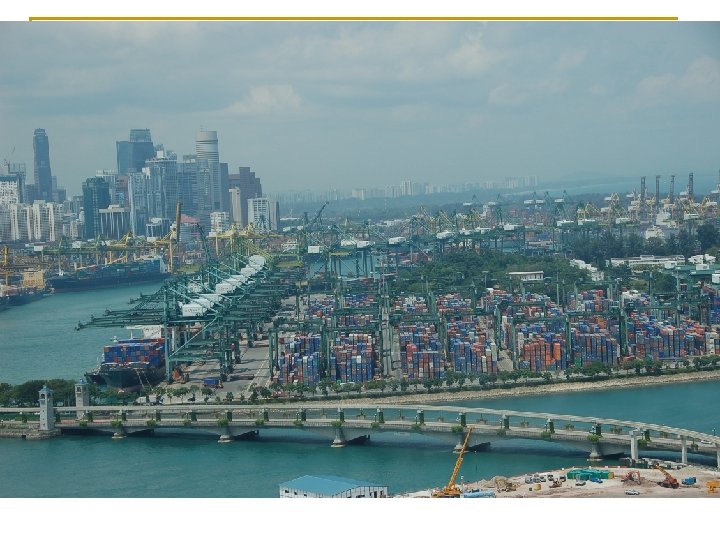
Berth and quay relationship
 and a cross-sectional view of a bay")
Storage location structure of a vessel (a) and a cross-sectional view of a bay (b)

Motivation – Quay crane assignment problem n n Quay crane assignment problem is among the most important decision problems in a port container terminal since a good allocation of cranes to the incoming ships will enhance ship owners' satisfaction and increase terminal productivity, leading to higher revenues. We model the crane assignment problem as a moldable task scheduling problem by the following transformation quay cranes processors ships tasks turn-around time schedule length

Classification scheme for BAP formulations

Overview for BAP formulations

Classification scheme for QCSP formulations

Overview for QCSP formulations
")
Our problem n Cont / stat / QCAP / max(compl)

n n We consider the berth allocation and quay crane assignment problems as a moldable task scheduling problem by incorporating the fact that the number of quay cranes allocated to a ship will affect its berthing time. This approach can simultaneously increase the utilization of quay cranes, shorten the turn-around time of ships, and decrease the waiting time of the containers.
")
Moldable Tasks Model n We consider a set of m identical processors (quay cranes) using for executing the set of n independent, nonpreemptable moldable tasks (ships). q q n n An amount pj > 0 of work is associated with each task Tj. fj(r) 0 is a non-decreasing processing speed function, fj(0) = 0. q n Each task needs for its execution any number of processors (at least one but less or equal to m). The total number of processors executing the tasks should not exceed m at any time. fj(r) relates processing speed of task Tj to a number of processors allocated. The criterion assumed is schedule length.

The solution of the continuous problem n To explain the main idea of finding a solution for the continuous problem, we introduce set n of feasible resource allocations and set n of feasible transformed resource allocations. Denote p = (p 1, … , p n) n Theorem (Weglarz 82) Let n m, conv. U be the convex hull of the set U, i. e. the set of all convex combinations of the elements of U, and u = p/C be a straight line in the space of transformed resource allocations given by the parametric equations u j = p j /C, j = 1, … , n. Then the minimum makespan value for continuous problem can be found from

The solution of the continuous problem n From Theorem it follows that the minimum makespan value C*cont for continuous problem is determined by the intersection point u 0 of the straight line u = p/C, C > 0, and the boundary of the set conv. U in the n-dimensional space of transformed resource allocations.

The solution of the continuous problem n n n The proposed algorithm starts from the continuous version of the problem and transforms the schedule obtained from the continuous version into a feasible schedule for the discrete MT model. We assume that with each task the concave processing speed function is associated. In an optimal schedule for continuous problem all the tasks are processed in the interval [0, C*cont] and task Tj uses r*j processors, j = 1, . . . , n.
 processing time t(1) 2 processors")
Concavity justification Turn around time on 1 processor (crane) processing time t(1) 2 processors berthing time processing time t(2)
- Slides: 23