Beamline Control and Data Acquisition System at SSRF

Beamline Control and Data Acquisition System at SSRF Zhang Zhaohong, Zheng Lifang Beamline Control Group Shanghai Synchrotron Radiation Facility about 25 pages

Outlines 1. 2. 3. 4. 5. 6. Overview Infrastructure Control System Data Acquisition System Current Missions Conclusion Average 4 slides per section

1. Overview 1. 1 Organization 1. 2 Responsibilities 1. 3 System Overview

1. 1 Organization Beamline Engineering Department Control Group • 1 group leader • 7 engineers Electronic & Detector Group • 1 group leader • 5 engineers • 1 technician Experiment Departments 13 Beamlines • Each scientific village has 1 to 3 control engineers IT Department • ~ 4 related people
 E & D")
1. 2 Responsibilities Control Group Beamline Control Endstation Control (participate ) E & D Group Experiment Dep. IT Dep. Personnel Safety Endstation Control Network Equipment Protection Beam Monitoring Data Acquisition Computing & storage infrastructure Control group cooperates with beamline staff to complete the whole control and data acquisition system

DAS: Data acquisition system 1. 3 System overview CA interface DAS EPICS DAS Labview EPICS CA protocol Based on TCP/IP Communication Protocol PLC system Equipment protection EPICS Computer interface Platform Control system DAS SPEC EPICS: Experimental physical industrial control system PLC system Personnel safety DAS VC++ DAS Blu-Ice

2. Infrastructure 2. 1 Network 2. 2 Personnel Safety Interlock System 2. 3 Equipment Protection System

2. 1 Network Structure • Each beamline has an independent subnet. Computing Center Cluster Switch SSRF Central Switch MX & Image beamline Switches e th In Beamline Central Switch Other Beamline Switches Control Room Switch re u t fu

2. 2 Personnel Safety Interlock System A-B Control-Logix 5561 Digital Values PLC Bus Photon Shutter Safety Shutter Emergency buttons Interlock key Control Panel & Display Screen PLC Modules EPICS software Get digital values Calculate logics Set up interlocks Give alarming signal Have the capacity to access each tag in PLC DI Search Buttons Door Switches Ethernet DO Search Buttons

2. 3 Equipment Protection System Water Flow state Temperature PLC modules Vacuum etc. Vacuum Gauge Serial Server PLC system EPICS Software OPI Ethernet PLC touch panels

3 Control System 3. 1 EPICS Overview 3. 2 Motion Control 3. 3 Message Based Devices’ Control 3. 4 Detector Control 3. 5 Scan Mechanism 3. 6 OPI Tools 3. 7 Other Tools Altogether 10 slides

We benefit a lot from EPICS, developed so perfectly. 3. 1 EPICS Overview OPI Layer LAN: CA Protocol VME-IOC Motion Control status monitor PC-IOC Detector Control EPICS is competent for any control task in beamlines. PC-IOC Data Acquisition

3 Control System 3. 1 EPICS Overview 3. 2 Motion Control 3. 3 Message Based Devices’ Control 3. 4 Detector Control 3. 5 Scan Mechanism 3. 6 OPI Tools 3. 7 Other Tools Altogether 10 slides

Beam line is all about motors 3. 2. 1 Mathematical Model Control Objects Control Variables Execute Components Slit step motors (over 95%) Size, offset Mirror Chamber Height, pitch, roll Monochromator Energy, etc. Sample Stage … Filter … BPM … etc. … Motion control is everywhere. Position control !

We formed a Standardized method to implement motion systems using the elements in EPICS. 3. 2. 2 EPICS facilities OPI Output Algorithm Input EPICS IOC • motor record Ø ~100 fields records IN Ø Ø • soft. Motor record Ø ~100 fields • Low level drivers re co PVS • Transform record Ø A~P, float fields Ø CLC field(C language calculation) rd P PP O Lin N UT ks PP ty C pe P s m od es database In EPICS’s world, everything is PV. PVs = fields of EPICS record.
/4 pitch")
3. 2. 3 example Var. motors and formulas y y=(2*y 1+y 2+y 3)/4 pitch Pitch=atg (((y 2+y 3)-2 y 1)/2) roll Roll=atg ((y 3 -y 2)/W) x x=(x 1+x 2)/2 yaw=atg ((x 2 -x 1)/L) Implement the formulas in IOC transform records soft. Motor records motor records Controlled variables motors

3. 2. 4 hardware for step motor control Normalized connector and cabling discipline MAXv-8000 motion controller 8 axes Open/closed loop EPICS driver support VME single board computer MVME 5500 Custom-build standard power rack & modular motor drivers CPU: 1 GHz On-board memory: 512 M Ethernet interface: gigabit Bus speed: 66 MHz OS: Vx. Works 5. 5 Power supply: 24 VDC/48 VDC 2 -phase, 5 -phase 0. 2~6 A driver current 0~100% holding current Phytron’s core motor power stage Standardized & normalized hardware High efficiency & Good result

3 Control System 3. 1 EPICS Overview 3. 2 Motion Control 3. 3 Message Based Devices’ Control 3. 4 Detector Control 3. 5 Scan Mechanism 3. 6 OPI Tools 3. 7 Other Tools Altogether 10 slides

Epics communicates with devices through serial port or ethernet port. 3. 3 Message Based Devices PI-E 621 RS-232 RS-485 Ethernet PI-C 863 Serial Server EPICS Soft IOC LAN stream. Device dev. GPIB Configure a protocol file Configure a C struct Asyn Newport-XPS Simple Pro-dex MAXnet Write some C codes Complicated Three independent methods, the more complicated, the more freedom

3 Control System 3. 1 EPICS Overview 3. 2 Motion Control 3. 3 Message Based Devices’ Control 3. 4 Detector Control 3. 5 Scan Mechanism 3. 6 OPI Tools 3. 7 Other Tools Altogether 10 slides

Ionization Chambers 3. 4 Detector Contol picoammeter + EPICS VME ADC card + EPICS V/F + VME scalar + EPICS NI ADC + Labview Solid Detectors XIA electronic readout system & EPICS CCDS • Thank EPICS community! • There are so much hardware used in the worldwide synchrotron facilities with EPICS. • It’s a shortcut to choose among these hardware. • We share the benefit of EPICS/syn. Apps package, which has many support EPICS & image software modules for specific devices.

3 Control System 3. 1 EPICS Overview 3. 2 Motion Control 3. 3 Message Based Devices’ Control 3. 4 Detector Control 3. 5 Scan Mechanism 3. 6 OPI Tools 3. 7 Other Tools Altogether 10 slides

Scan mechanism is the most important Scan Mechanism • SSCAN soft modules Ø Scan record Ø Save. Data function Ø Plotting function • Every numeric PV is scannable Ø motor. VAL • Move to the next desired point Wait DLY seconds for positioners to settle down Every numeric PV can act as a detector. • Start scan Data of positioners and detectors Trigger the detector are collected in scan record’s array fields. • 1 -D、2 -D and multi-D scan be achieved flexibly. Wait DDLY seconds for detectors to settle dpwn Post data Stop scan Set scan. EXCS = 1 step by step scan Continuous loops until the last point Some predefined functions can be invoked during these periods. Example: Do averaging

3 Control System 3. 1 EPICS Overview 3. 2 Motion Control 3. 3 Message Based Devices’ Control 3. 4 Detector Control 3. 5 Scan Mechanism 3. 6 OPI Tools 3. 7 Other Tools Altogether 10 slides

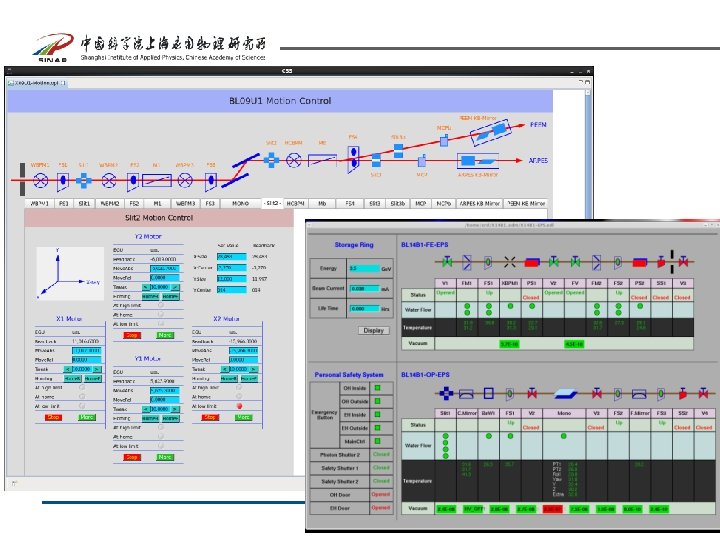
EDM: Extemsible Display Manager 3. 6 OPI Tools EDM @ Linux medm @ Linux&windows CSS@Linux&windows Static graph widgets Monitoring widgets control widgets PV finder data. Browser plot 2 D strip. Tool probe Probe MEDM: Motif Editor and Display Manager PV tree CSS: Control System Studio

3. Control System 3. 1 EPICS Overview 3. 2 Motion Control 3. 3 Message Based Devices’ Control 3. 4 Detector Control 3. 5 Scan Mechanism 3. 6 OPI Tools 3. 7 Other Tools Altogether 10 slides

3. 7 Other Tools EPICS Sequencer Ø one component of EPICS IOC Pviewer Ø motif tool to manage the. MDA Ø access/compute /analyse Ø C or SNL language Ø example: FFT; event trigger generator EPICS Archiver data saved by the scan record image. J / fid 2 d / igor / origion Ø tools to show and analyse image data or 2 D ASC-II data PythonJavascript IDL Ø one EPICS tool Ø with CA interface to EPICS Ø archive PVS Ø flexibly do high level Ø plot historic data applications

4. Data Acquisition System 4. 1 Overview 4. 2 Example: Blu-Ice

4. 1 DAQ Overview

DCSS: Distributed Control System Server 4. 2 Example: Blu-Ice EPICS Control System Tango. Device. Server Camera. Man Cam. Server Call API DHS EPICS gateway DHS LAN DCSS servers GUI TK DHS: Distributed Hardware Server GUI: Graphic User Interface

5. Current Missions 5. 1 Time Resolved Experiments 5. 2 Sub-second QXAFS 5. 3 Feedback System

XEOL: X-ray Excited Optical Luminescence 5. 1 Time-resolved Experiments TR-XEOL Ø Pump: single X-ray pulse Ø Probe: Electronic devices Ø To get the luminescence decay curve Ø Resolution: 2 ns Time structure of a special electron bunch pattern Laser Pump-probe system Ø Pump: Laser pulse Ø Probe: X-ray pulse Ø To study the intermediate state of the reversible reaction Ø Resolution: ~100 ps

5. 2 Sub-second QXAFS Key techniques: Ø synchronous triggers Ø timing system

Many requirements in our coming beamlins 5. 3 Feedback System Beam Position Feedback Beam Intensity Feedback Nano-meter focusing Feedback PSD BBPM CCD photodiodes CCD or other devices Laser interferometer Monochromator To develop a universal high performance digital feedback controller based on FPGA Mirrors Nano-meter sample stage

6. Conclusion

6. Conclusion FStandard control system has been developed Ø Standard hardwares Ø standard software based on EPICS Ø EPICS does a lot for us, we should do more for EPICS next. FData acquisiton systems are various Ø Wish to develop a universal one Ø With generic application framework, common feel&like GUIs, configurable and reusable components, capacity to trace behaviors, and “learn once, use everywhere” features.

6. Conclusion FGreat challenges are waiting for us Ø picosecond time-resolved experiments. Ø nano-meter feedback controls Ø sub-micrometer beam detect technologies Ø information management system based on database We hope to collaborate with experts throughout the world.

Thank you for your attention
- Slides: 39