AUTOMATIQUE Etude des capteurs de dplacement Choix dun


 identiques à celles détecteurs électroniques")





 = P précision souhaitée P est")









 1 f = N. R 60 - Calcul")

 du codeur : n = 20")




- Slides: 30
AUTOMATIQUE Etude des capteurs de déplacement
Choix d’un codeur Les critères de choix* d’un codeur sont : - Le type de sortie - Le diamètre extérieur - La connectique - Le degré de protection - Le type d’axe - La résolution (nombre de points) * hors choix technologique (absolus ou incrémental)
Différentes sorties : Sorties à transistor (à collecteur ouvert) identiques à celles détecteurs électroniques : NPN : logique négative PNP : logique positive
Le diamètre extérieur Les diamètres extérieur et d’axe du codeur sont déterminés par la Partie Opérative (PO)
La connectique Un grand nombre de choix est disponible, du codeur livré avec son câble (petit diamètre) aux « gros » codeurs livrés avec une embase. La sortie peut être radiale ou axiale.
Le type d’axe Les axes peuvent être plein ou creux. Lorsqu’un désaxage est prévisible, on utilise un axe plein lié à la machine par un accouplement externe
Calcul du nombre de points Le mouvement est circulaire, le codeur contrôle un déplacement exprimé en ° d’angle Le mouvement est de translation, le codeur contrôle un déplacement exprimé en mètre Une fois le nombre de points calculé, il reste à déterminer quel type de codeur est le mieux adapté : Incrémental ou Absolu
Mouvement de rotation Exemple : Précision = 0, 2° Nombre de points = (360/0, 2) = 1800 p/tr
Mouvement de translation Résolution (nombre de points /tour) = P précision souhaitée P est le rapport de conversion du mouvement de rotation en mouvement de translation Exemple : D=200 mm Précision = 0, 2 mm P = x D = x 200 = 628 mm Nombre de points = (628/0, 2) = 3140 p/tr
Choisir entre un codeur Incrémental ou un codeur absolu Absolu Incrémental Front montant Front descendant Si le système n’utilise que les fronts montants, il faudra autant de fentes dans le disque de points calculés. S’il utilise aussi les fronts descendants, on pourra diminuer le nombre de fentes par 2, voire par 4 s’il utilise à la fois les signaux A et B. Le codeur devra posséder suffisamment de sorties (bits) pour que le nombre de combinaisons soit supérieur au nombre de points calculés. Mais il faudra prévoir un codeur multi-tours si le déplacement contrôlé l’impose !
Codeur multi-tours
Codeur incrémentaux Avantages : • Simple à mettre en œuvre. • Sans limite de déplacement. Inconvénients : • Il faut l’accompagner d’un détecteur de position initiale afin de remettre à zéro le compteur qui lui est attribué. • Lors d’une coupure de courant, il faudra réinitialiser le système.
Codeurs absolus simple et multi-tours Avantages : • Lors d’une coupure de courant, il n’est pas nécessaire de réinitialiser le système. • Ils ne nécessitent pas d’entrée spéciale sur un API. Inconvénients : • Ils sont limités en nombre de tours. • La conception du programme est plus délicate.
Implantation optimale des codeurs dans un automatisme Où installer le codeur ? Plus le besoin de précision est grand, plus il faut que l’axe d’entraînement du codeur soit près du mobile de façon à éviter les jeux et les imperfections mécaniques. Plus il y a d’intermédiaires mécaniques (= liaisons) entre le codeur et la position réelle du mobile, plus il est nécessaire de compenser la somme des jeux mécaniques pour obtenir une bonne fidélité.
Exemples de raccordement d’un codeur à un automate programmable Codeur incrémental
Codeur absolu
Formulaire : - n : nombre de points par tour ou résolution - P : conversion mvt rotation en mvt translation (mm) - N : vitesse de l’axe d’entraînement en tr / min - R : résolution choisie du codeur - f : fréquence en Hertz P n = Précision (mm) N f = . R 60
Exercice 1 : Etude d’un codeur incrémental : Caractéristiques de la machine : Longueur des profilés : 0, 02 m < L < 1 m Précision de la coupe : 0, 5 mm Vitesse de rotation des rouleaux : 120 tr / min La prise des cotes de la longueur du profilé est contrôlée par un codeur incrémental. La fréquence maximale d’acquisition des entrées TOR de l’API est de 500 Hz Travail demandé : - Calculer la résolution du codeur - Calculer la fréquence f des impulsions de sortie de codeur - Peut-on connecter ce codeur sur les entrées TOR de l’API ?
P Formules n = Précision (mm) 1 f = N. R 60 - Calcul du nombre de points (ou résolution) du codeur : n = (3, 14 x 100)/0, 5 = 628 points - Calcul de la fréquence du codeur : f = (1 / 60) x 120 x 628 = 1256 Hertz - Le codeur peut-il être connecté à une Entrée API dont la fréquence d ’acquisition est de 500 Hertz ? non, car la fréquence d’acquisition de la carte d’entrée (500 Hz) est inférieure à celle délivrée par le codeur (1256 Hz)
Exercice 2 : Etude d’un codeur absolu : On désire contrôler le positionnement d’un plateau dont le déplacement linéaire est obtenu par une chaîne cinématique avec vis à billes entraînée par un moteur asynchrone. Vis à bille : - Pas = 20 mm / tr - Longueur = 1 m - Précision du positionnement : 0, 01 mm - Rapport de réduction de la chaîne cinématique : 1 Travail demandé : - Calculer la résolution du codeur - Calculer le nombre de tours nécessaires si on doit choisir un codeur multitours - Définir le branchement de ce codeur sur un API.
- Calcul du nombre de points (ou résolution) du codeur : n = 20 / 0, 01 = 2000 points pas - Nb de pistes du disque position dans le tour : 2 11 = 2048 points 11 pistes - Calculer le nombre de tours nécessaires si on doit choisir un codeur multi tours - 1 tour = 20 mm = pas de la vis - Longueur de déplacement = 1 m = 1000 mm - Nb de tours = Lg / p = 1000 / 20 = 50 tours - Nb de pistes du disque secondaire 2 6 = 64 points 6 pistes
Branchement du codeur sur un API
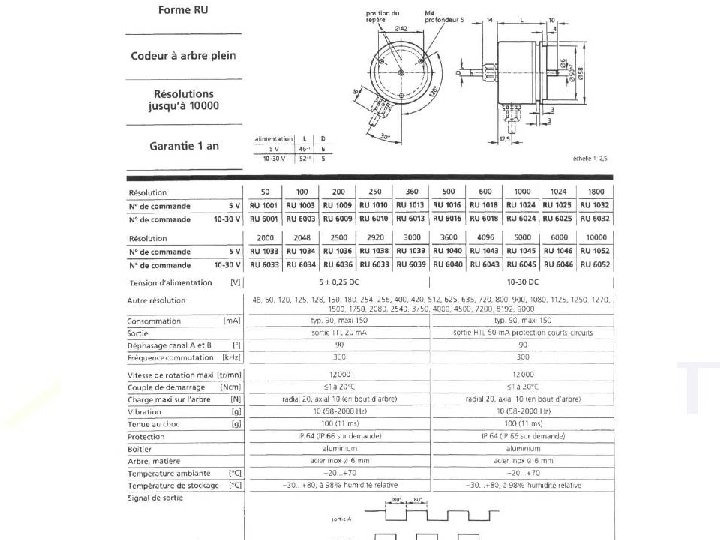
Exercice 3 : Mesure de déplacement avec un Codeur incrémental Un déplacement doit être mesuré, la précision souhaitée est de 0, 05 mm. Une crémaillère de longueur X et un pignon de Diamètre primitif de 15, 91 mm sont disponibles. Travail demandé : - Quel nombre de points le codeur doit-il avoir ? - Choisir le codeur (voir document annexe). Nota : Alimentation du codeur 10 -30 V DC
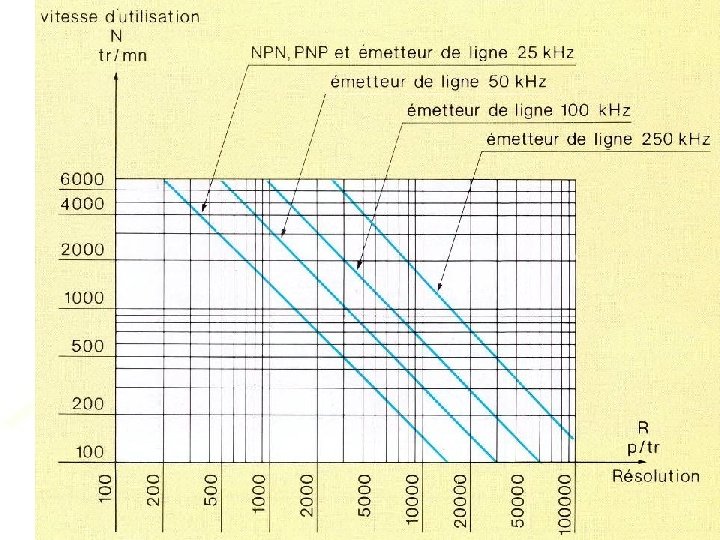
Exercice 4 : Détermination de la fréquence de commutation Une roue de mesure d’une circonférence de 500 mm est disponible. La fréquence de rotation maxi est de 6000 tr/mn. Travail demandé : - Quel nombre de points le codeur doit-il avoir pour une précision de 0, 1 mm ? - Calculer la fréquence de commutation maxi.
Exercice 5 : Un moteur à courant continu entraîne un codeur incrémental qui est branché en sortie du réducteur : On mesure en sortie du réducteur (rapport 1/30) une vitesse de 160 tr/min. 1 - En déduire la vitesse du moteur. La roue entraîne par adhérence un tapis roulant. 2 - Calculer la vitesse du tapis roulant (en m/s) sachant que le rayon de la roue est de 45 mm. On souhaite pouvoir mesurer le déplacement du tapis avec une précision de 1 mm. 3 - Calculer la valeur théorique du codeur. Choisir parmi les codeurs disponibles suivants : - 150 pts/tour 200 pts/tour 250 pts/tour 300 pts/tour 4 - Recalculer la précision du codeur. 5 - Définir la fréquence de commutation maxi.