Automatic Collision Avoidance Systems ACAS Aircraft proximity A
")




 together with airborne")




 is")

 Automatic Dependent Surveillance- Broadcast (ADS-B) messages are transmitted")
 Hybrid surveillance does not include the use any")

 alert pilots if")

 In the late 1990 s improvements were")


- Slides: 23
Automatic Collision Avoidance Systems (ACAS)
Aircraft proximity A situation in which in the opinion of a pilot or air traffic control officer, the distance between two or more aircrafts, as well as their relative positions and speeds, may have compromised their safety. The code word used to indicate aircraft proximity is AIRPROX. All cases of aircraft proximity must be reported. An aircraft proximity is classified as: risk of collision when a serious risk of collision has existed; safety not assured when the safety of aircraft may have been compromised; no risk of collision when no risk of collision existent; risk not determined when insufficient information was available to determine the risk involved or inconclusive evidence precluded such determination.
Significance of avoidance collision systems in aviation Collision hazards depend from probabilities of navigation system correct detects aircraft’s position (Pnav) and operations traffic control system (Pcont). 2 2 Q=(1 -Pnav) * (1 -Pcont) Conflict situation is forecast approaching in space and time to infringement minimum requirement separation between airplanes.
Significance of avoidance collision systems in aviation If aircraft has airborne collision warning systems, hazard of flight 2 is decreasing 2 2 Q=(1 -Pnav) * (1 -Pcont) *(1 -Pcws) Here, Pcws – probability of correct decision problem by the instrumentality of board collision warning system
Creation of automatic Collision Avoidance Systems Whole equipment complex considerably raised operation level of aircrafts in high level flight intensity regions. It was result of development radiolocating technology. This equpments were named as Automatic Collision Avoidance Systems. Perfection of secondary radars on the basis of introduction of an is discrete-address mode and technics of monopulse reception allows considerably spread to possibility of their use for rise to safety of an air traffic. The problem of the prevention and the decision of threat of collision is based on use of a line of data transmission of is discrete-address system of a secondary
Operation algorithm The land system of the prevention of collisions (LCAS) together with airborne system (ACAS) allows to provide rational use SSR in controlled and in uncontrolled airspace. For revealing and the decision of threat of collision ACRF the algorithm solves following functions: A preliminary filtration of parameters of movement of the ACRF; Revealing of potentially possible conflict or collision threat; Development of recommendations LCAS under the decision of threat of collision; Interaction with the automatic control system of the Air traffic
Operation algorithm The problem of a preliminary filtration consists in allocation in operative range LACS. The pairs planes are calculated mutual position on an interval of the forecast Tfor=60 - 90 sec and deside about supposes conflict possibility. Thus the estimation of mutual position ACRF is carried out in vertical and in horizontal planes. On this stage computer compare estimation of mutual position ACRF with given minimum safety distance and define about potential conflict situation: no dangering; conflict dangering; collision dangering. Computer had chosen necessary deviation manoeuvre for each ACRF and transmit decision to the aircraft and on a controller's screen.
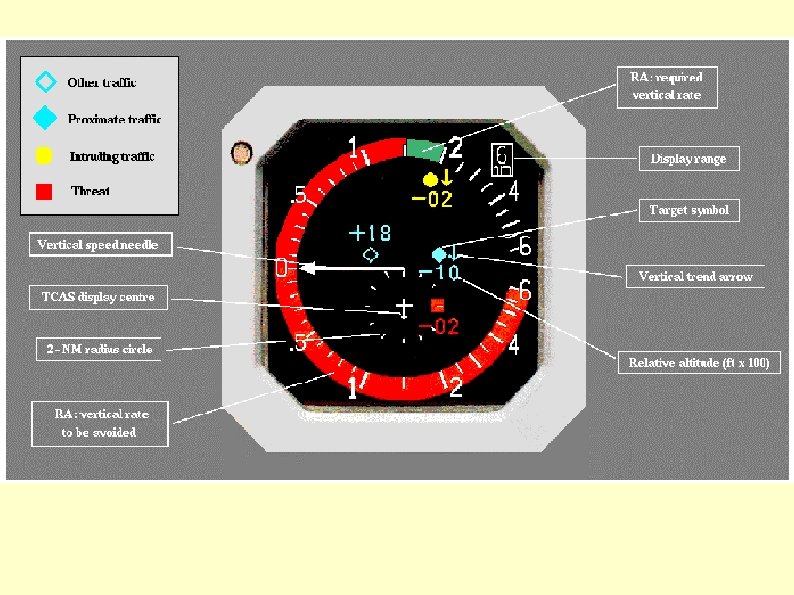
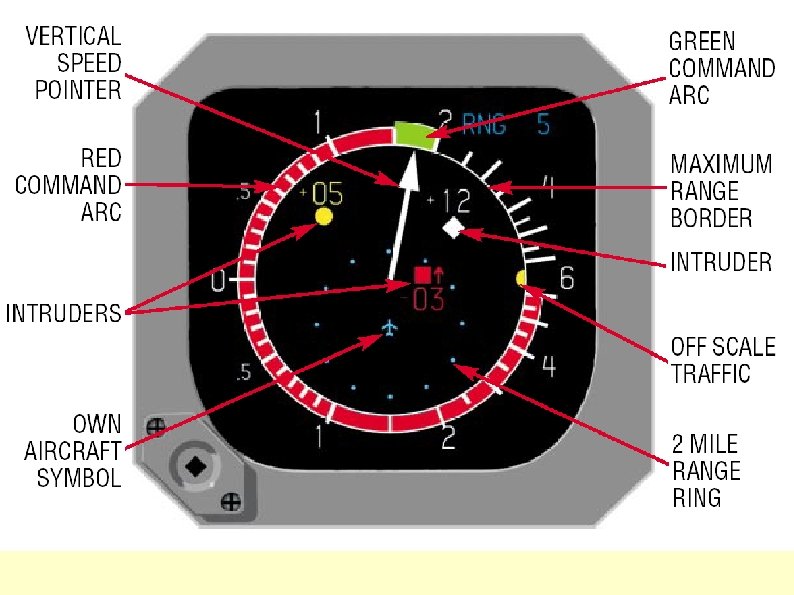
TCAS-2 Aircraft transmitter SSR mode S Reciever-Transmitter TCAS, it works in two modes: ATC RBS (mode C) and mode S Prevention collisions Logic that uses functions: surveillance, definitions of danger of collisions, maneuver deviations investigations, coordination with other systems TCAS The information and the notification display system Data H (RLS)
The aim that intresting Other A/C
Synchronous garble When a ‘Mode C only all-call’ interrogation is sent by TCAS, all Mode A/C transponders, which receive it, reply. Due to the duration of the reply, all Mode A/C equipped aircraft, whose difference of distance to the TCAS aircraft is low, can produce replies which overlap at the TCAS level. That is described as ‘synchronous garble’. Various techniques are employed to reduce this phenomenon. _ Algorithms allow the reliable decryption of up to three overlapping replies. _ The combined use of interrogations of variable power and suppression pulses permit the reduction of the number of transponders replying to an interrogation. This technique, known as ‘whisper-shout’, takes advantage of differences between the receiver sensitivity of transponders and the transponder antenna gains of the intruder aircraft. Another technique for reducing synchronous garble is the use of directional transmissions, which reduces the number of potential overlapping replies. However, slightly overlapping coverage must be provided to ensure 360 º coverage.
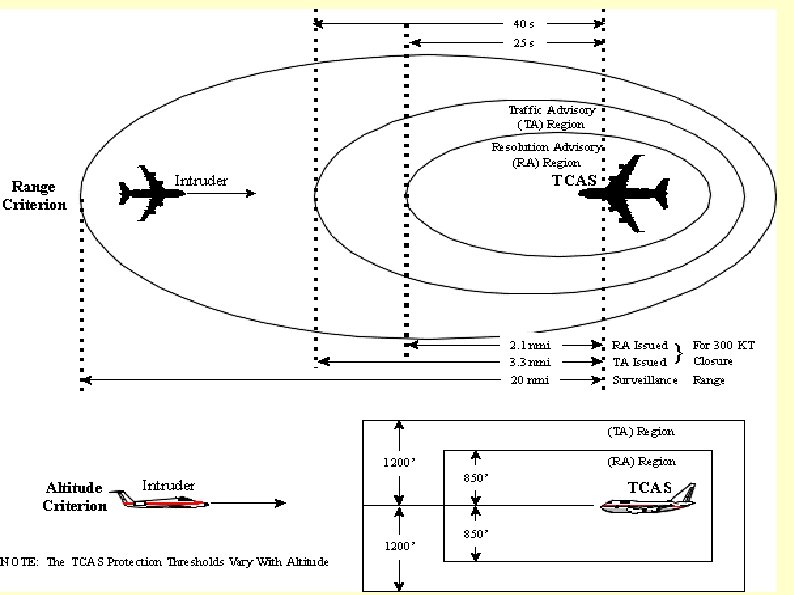
Traffic Collision Avoidance System The Traffic alert and Collision Avoidance System (or TCAS) is an aircraft collision avoidance system designed to reduce the incidence of midair collisions between aircraft. It monitors the airspace around an aircraft for other aircraft equipped with a corresponding active transponder, independent of ATC, and warns pilots of the presence of other transponder-equipped aircraft which may present a threat of mid-air collision (MAC). It is an implementation of the Airborne Collision Avoidance System mandated by ICAO to be fitted to all aircraft with MTOM (maximum take-off mass) over 5700 kg (12, 586 lbs) or authorized to carry more than 19 passengers.
TCAS basics TCAS involves communication between all aircraft equipped with an appropriate transponder (provided the transponder is enabled and set up properly). Each TCAS-equipped aircraft "interrogates" all other aircraft in a determined range about their position (via the 1030 MHz radio frequency), and all other craft reply to other interrogations (via 1090 MHz). This interrogation-and-response cycle may occur several times per second. Through this constant back-and-forth communication, the TCAS system builds a three dimensional map of aircraft in the airspace, incorporating their bearing, altitude and range. Then, by extrapolating current range and altitude difference to anticipated future values, it determines if a potential collision threat exists. TCAS and its variants are only able to interact with aircraft that have a correctly operating Mode C or Mode S transponder. A unique 24 -bit identifier is assigned to each aircraft that has a Mode S transponder. The next step beyond identifying potential collisions is automatically negotiating a mutual avoidance maneuver (currently, maneuvers are restricted to changes in altitude and modification of climb/sink rates) between the two (or more) conflicting aircraft. These avoidance maneuvers are communicated to the flight crew by a cockpit display and
Relationship to Automatic Dependent Surveillance (ADS) Automatic Dependent Surveillance- Broadcast (ADS-B) messages are transmitted from aircraft equipped with suitable transponders, containing information such as identity, location, and velocity. The signals are broadcast on the 1090 MHz radio frequency. ADS-B messages are also carried on a Universal Access Transceiver (UAT) in the 900 MHz band. TCAS equipment which is capable of processing ADS-B messages may use this information to enhance the performance of TCAS, using techniques known as "hybrid surveillance". As currently implemented, hybrid surveillance uses reception of ADS-B messages from an aircraft to reduce the rate at which the TCAS equipment interrogates that aircraft. This reduction in interrogations reduces the use of the 1030/1090 MHz radio channel, and will over time extend the operationally useful life of TCAS technology. The ADS-B messages will also allow cost (for aircraft) technology to provide real time traffic in the cockpit for small aircraft.
Relationship to Automatic Dependent Surveillance (ADS) Hybrid surveillance does not include the use any of the aircraft flight information in the TCAS conflict detection algorithms; ADS -B is used only to identify aircraft that can safely be interrogated at a lower rate. In the future, prediction capabilities may be improved by using the state vector information present in ADS-B messages. Also, since ADS-B messages can be received at greater range than TCAS normally operates, aircraft can be acquired earlier by the TCAS tracking algorithms. The identity information present in ADS-B messages can be used to label other aircraft on the cockpit display (where present), improving situational awareness.
Ground proximity warning system
A ground proximity warning system is a system designed to (GPWS) alert pilots if their ACRF is in immediate danger of flying into the ground or an obstacle. The U. S. FAA defines GPWS as a type of terrain awareness warning system. More advanced systems, introduced in 1996, are known as enhanced ground proximity warning system. History In the late 1960 s, a series of controlled flight into terrain (CFIT) accidents killed hundreds of people. (A CFIT accident is one where a properly functioning airplane under the control of a fully qualified and certificated crew is flown into terrain (or water or obstacles) with no apparent awareness on the part of the crew. ) Beginning in the early 1970 s, a number of studies looked at the occurrence of CFIT accidents. Findings from these studies indicated that many such accidents could have been avoided if a warning device called a ground proximity warning system (GPWS) had been used. As a result of these studies, in 1974 the FAA required all large turbine and turbojet airplanes to install TSO-approved GPWS equipment.
Operation The system monitors an aircraft's height above ground as determined by a radar altimeter. A computer then keeps track of these readings, calculates trends, and will warn the captain with visual and audio messages if the aircraft is in certain defined flying configurations ("modes"). The modes are: Excessive descent rate ("PULL UP" "SINKRATE") Excessive terrain closure rate ("TERRAIN" "PULL UP") Altitude loss after take off or with a high power setting ("DON'T SINK") Unsafe terrain clearance ("TOO LOW - TERRAIN" "TOO LOW - GEAR" "TOO LOW - FLAPS") Excessive deviation below glideslope ("GLIDESLOPE") Excessively steep bank angle ("BANK ANGLE") Windshear protection ("WINDSHEAR")
Enhanced Ground Proximity Warning System (EGPWS/ TAWS) In the late 1990 s improvements were made and the system was renamed "Enhanced Ground Proximity Warning System". The system was now combined with a worldwide digital terrain database and relies on Global Positioning System (GPS) technology. Onboard computers compared its current location with a database of the Earth's terrain. The Terrain Display now gave pilots a visual orientation to high and low points nearby the aircraft. EGPWS software improvements were focused on solving two common problems; no warning at all, and late or improper response. Statistics show that no aircraft fitted with a second-generation EGPWS has ever suffered a CFIT accident. As of 2007, 5% of the world's commercial airlines still lack a TAWS, leading to a prediction of two CFIT accidents in 2009, even though they are completely preventable.
Workings A TAWS works by using digital elevation data and airplane instrumental values to predict if a likely future position of the aircraft intersects with the ground. The flight crew is thus provided with "earlier aural and visual warning of impending terrain, forward looking capability, and continued operation in the landing configuration. "