Aula terica 3 Sistemas com resposta inversa e
























 e simule de novo")

- Slides: 29
Aula teórica 3: Sistemas com resposta inversa e de grandes retardos de Tempo Conteudo: • Sistemas com resposta inversa • Sistemas com grandes retardos de tempo
Sistemas com grandes retardos de tempo retardo de transporte É um fenômeno muito comum em sistemas de fluxo, também lhe chama tempo morto
A maneira de exemplo Considere a seguinte figura na qual um fluxo de líquido q atravessa um tubos isolado de área uniforme A e longitude L Considere que a densidade e a capacidade calorífica são constantes O fluído entra no tubos com uma temperatura X e se estivermos em estado estacionário a temperatura de saída Y deve ser igual a de entrada.
Se se produzir uma mudança em forma de degrau na temperatura de entrada, a mudança não se detecta na saída do tubos até que passe um tempo que chamaremos T, que é o tempo que requer o fluído para atravessá-la A resposta Y(t) ao final do tubos deve ser idêntica a X(t) somente deslocada o tempo T T se pode calcular
Desta figura pode observar-se que Se se transformar pelo Laplace ambos os lados A função de transferência entre a temperatura de saída e entrada do fluído no tubos é
Observe que esta função de transferência é diferente às que usualmente vemos (divisão de polinômios) Quando trabalhamos com o Simulink, existe um bloco (Transport Delay) que nos permite simulá-lo Mas não no Matlab propriamente Tampouco pode aplicar a este tipo de função o critério de estabilidade do Routh. Muitas vezes por isso se utilizam aproximações Mas usada, aproximação do Padé de 1 er Ordem (Há outras)
Resposta de freqüência do retardo de transporte Módulo e fase
Diagrama polar O retardo de transporte não contribui nada à magnitude de um sistema mas acrescenta fase negativa crescente com a variação de freqüência
Observe o que pode acontecer com a presença de um retardo de transporte devido à soma de fase negativa que ele introduz O retardo de transporte faz que o sistema se torne instável
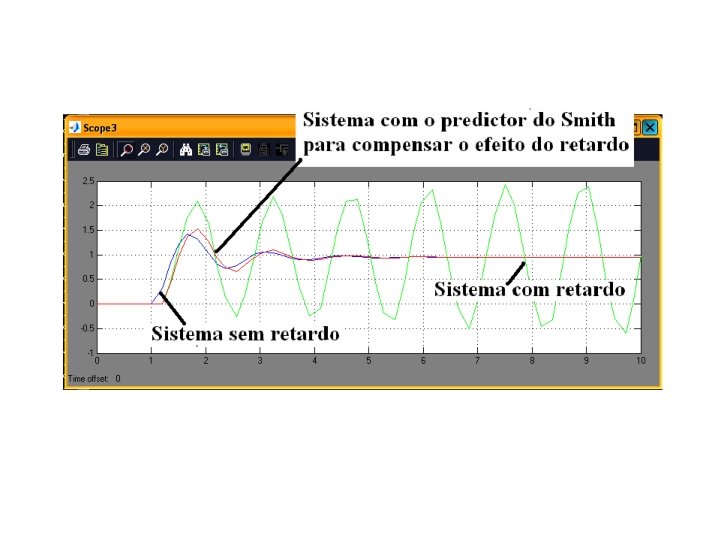
Porque acontece isto? Quando se produz uma mudança na entrada não se reflecte na saída até passado muito tempo o qual é geralmente insatisfatório Se este retardo é igual o maior que a constante de tempo dominante do sistema, pode se considerar com grande retardo de tempo. Nestes casos a correcção chegará muito tarde. Para superar essa dificuldade se propõe o que se conhece como Preditor do Smith
O efeito do retardo pode se reduzir com uma modificação como a seguinte: O compensador do retardo reduz o efeito retardado que a variável manipulada terá sobre a saída do processo. Note que a implementação do Predictor de Smith só é possível si se conhece o modelo do processo.
Matematicamente O sinal medida A O sinal de realimentação ¨não vê o retardo¨
Exemplo com o mesmo sistema que já vimos anteriormente
Processos com resposta inversa: Existem processos que pela combinação de diferentes fenômenos, a resposta a um passo inicialmente se move em sentido oposto ao sentido ao que finalmente tenderá. Estes processos se denominam de resposta inversa o de não-mínimo desfasaje. Um exemplo deste tipo de processos é o Nível do líquido no domo de uma caldeira.
1. A água fria causa uma caída de temperatura, pelo que decresce o volume das borbulhas de vapor. Isto cria uma diminuição do nível do líquido da água fervendo, 2. Com um fluxo de calor constante a produção de vapor permanece constante e o nível do líquido de água fervendo começa a crescer em forma integral.
Ante uma mudança tipo degrau ocorre na entrada Para K 2 1 < K 1, o segundo termo domina inicialmente a resposta. O modelo resultante tem um zero positivo no ponto
LGR do sistema exposto Observe que o zero na parte direita provoca que as raízes se desloquem fazia ali e portanto o sistema pode muito facilmente tornar-se instável
Os processos com resposta inversa são difíceis de controlar Tem duas formas básicas de controle: . Controle com PID. Usa-se um controlador PID sintonizado por Ziegler-Nichols. A ação derivativa antecipa-se ao movimento em forma oposta da resposta e provoca uma ação corretiva para limitar (nunca é eliminado totalmente) o pico inverso Compensador de resposta inversa. Nos casos de sistemas com grandes retardos de tempo, utilizava-se um Predictor de Smith para compensar esse retardo. Neste caso, se utilizará um compensador similar ao Predictor de Smith, concebido para atuar contra a resposta inversa.
Suponhamos o sistema: Esse processo terá uma resposta inversa se Que terá um zero positivo na malha aberta no ponto: Agregando um compensador onde
Com isso obtém-se que o zero na função de transferência de malha aberta resultante seja não positiva: O sistema será:
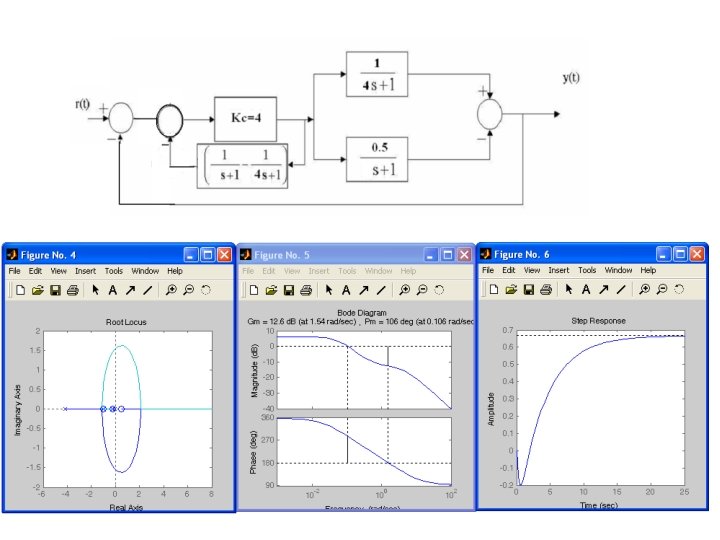
Exemplo
O esquema de controle anterior pode reordenar-se assim
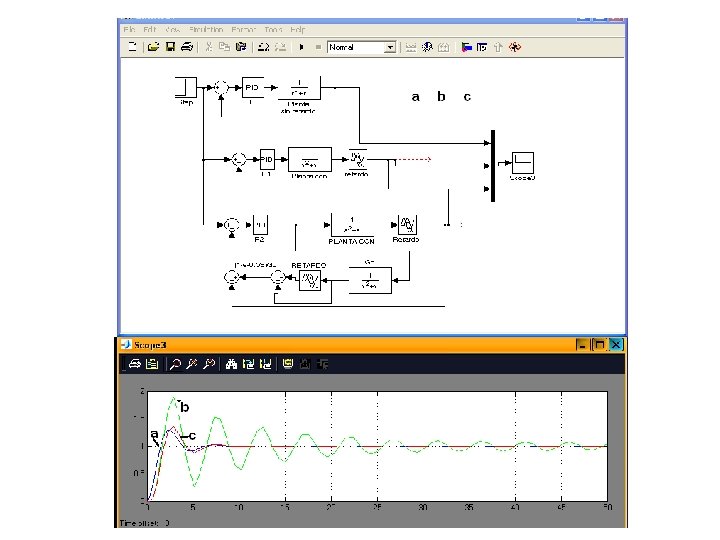
Comparando sem e com a compensação
Conclusões: O compensador com resposta inversa predize o comportamento inverso do processo e cria um sinal corretiva para eliminá-lo. A predição é baseada no modelo do processo, que sempre é aproximado. As imprecisões no 1 y 2 deteriora o comportamento do compensador de resposta inversa, ocasionando incrementos do pico inverso e uma resposta mais lenta
Exemplo: Encontre o compensador de retardo apropriado (Predictor do Smith) e simule de novo em um terceiro esquema para repetir a comparação
O compensador ou predictor do Smith deve obtê-lo a partir de um esquema como este