Auditory Perception 2 Linear Systems Signals en Systems





 0 This is the representation of signal x(t) in")








 the SUPERPOSITION PRINCIPLE: (Convolution Integral) (Transfer Characteristic)")


 EXAMPLE 2: the PINNA acts as a direction-dependent linear acoustic filter")

- Slides: 25
Auditory Perception: 2: Linear Systems
Signals en Systems: To understand why the auditory system represents sounds in the way it does, we need to cover some elementary background of signal analysis: - representation in the time domain (impulses) - representation in the frequency domain (sines, Fourier) and of linear systems analysis Mathematical concepts for today: - Dirac delta function (repeat) - the superposition principle (linearity) - the impulse response - the relation between impulse response (time domain) and transfer characteristic (frequency domain): Fourier
The Dirac impulse: 0 A simple approximation of the Dirac-impulse function is a rectangular pulse, e. g. at time tk: δk tk tk+∆T
IN THE TIME DOMAIN: EVERY SIGNAL CAN BE REPRESENTED BY A SUM OF WEIGHTED DIRAC PULSES: Example: A step signal is simply a sequence of pulses with height 1: Step = sum of pulses (of width ∆t ) with weight 1 Mathematically:
Any arbitrary signal can be approximated by a sequence of pulses with variable height (weight): Sum of weighted pulses:
Approximation: Exact: tk tk+∆T U(t) 0 This is the representation of signal x(t) in the time domain by impulse functions. Note: the STEP is the cumulative integral of the pulse:
Linear Systems Theory: the BLACK-BOX approach ‘known’ ‘unknown’ ‘known’
We restrict ourselves to Linear Systems: Our crucial concept for today: the Superposition Principle LINEAIR if input x 1(t) => Output y 1(t) and input x 2(t) => Output y 2(t) then it is required that: x 1(t) + x 2(t) => y 1(t) + y 2(t) In general: !!!! N. B. This requirement holds for all t! t
Our next important concept: the Impulse Response of a Linear System: Thanks to the Superposition Principle, we can compute the response of a Linear System for an arbitrary input signal, from the system’s Impulse Response! How?
We just noted that each signal can be precisely represented by a weighted sum of Dirac pulses: (integration = very precise summation) Now suppose that each Dirac impulse at time t-τ gives an Impulse Response h(t-τ) THEN: Precise prediction of the system’s response y(t) is the same weighted sum of the Impulse Responses:
We are dealing with causal systems only, meaning that there will be a response ONLY AFTER there was an input! (This means mathematically that h(t)=0 for t<0 ) the CONVOLUTION INTEGRAL
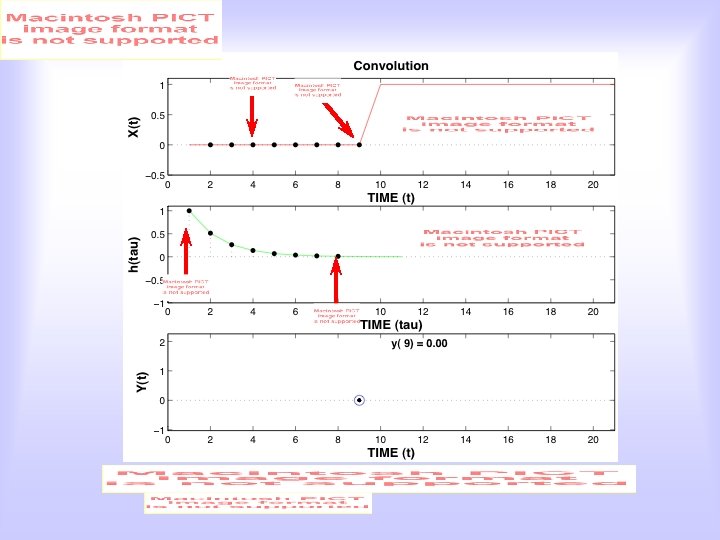
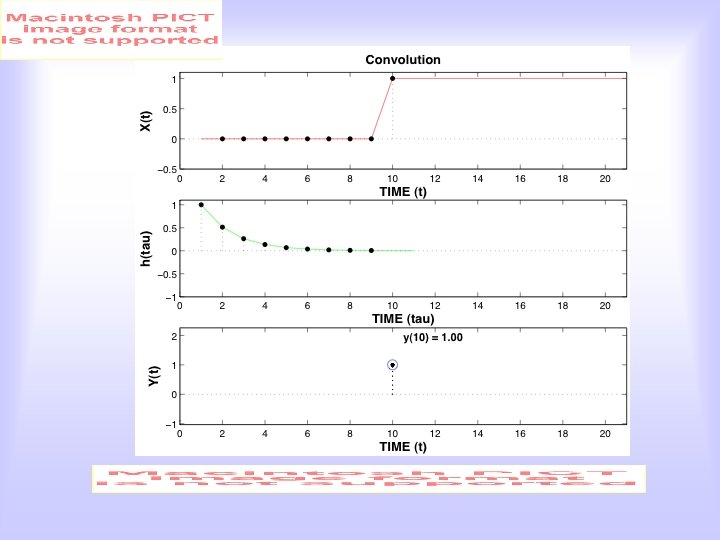
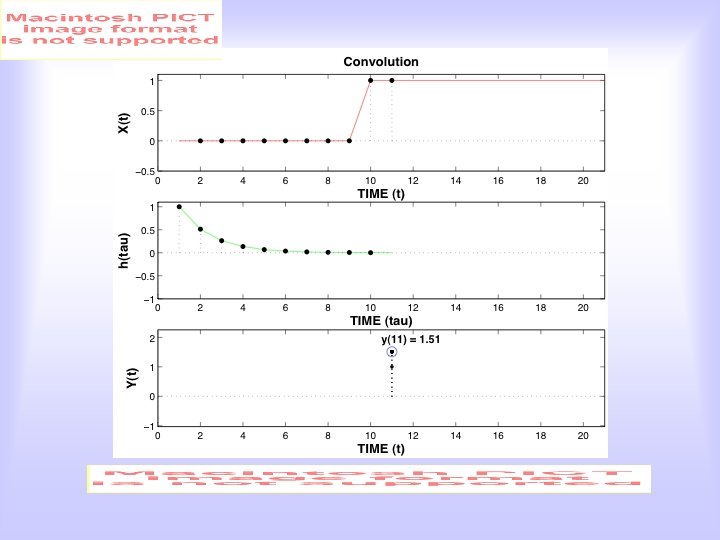
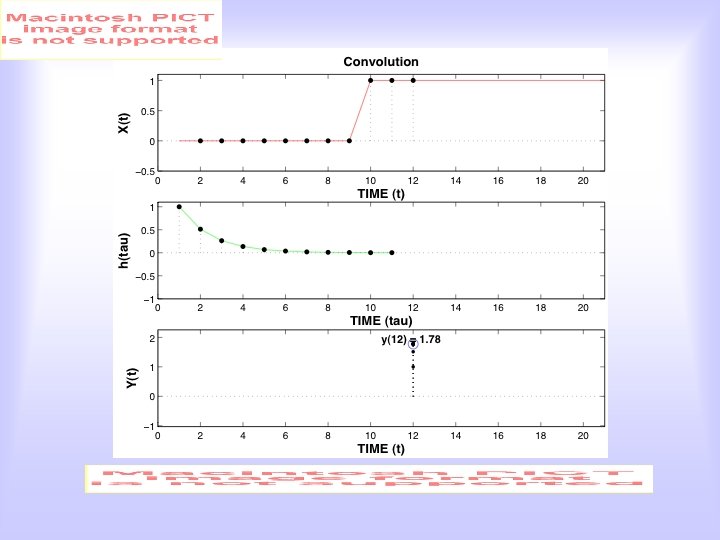
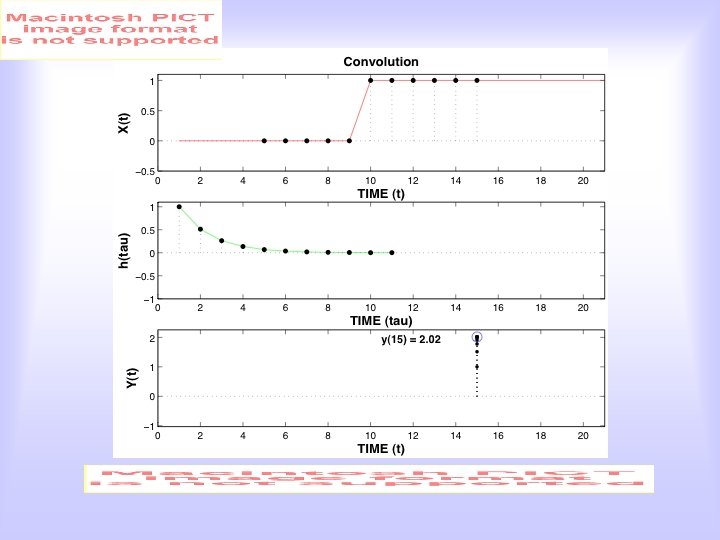
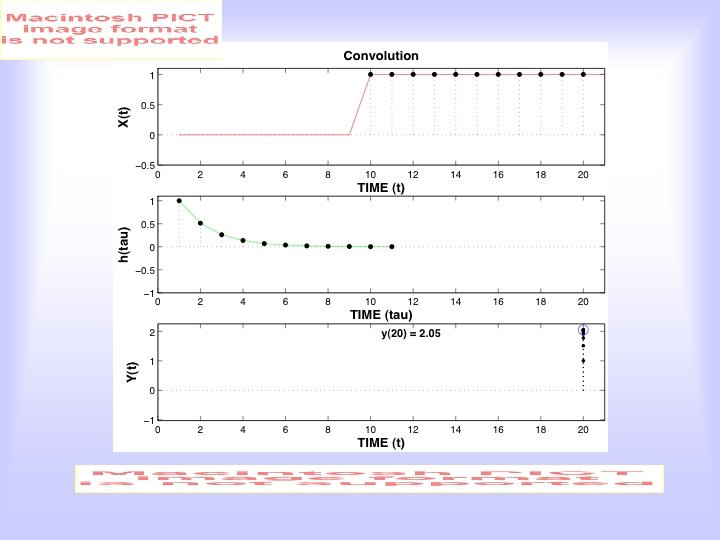
How does convolution work?
The total convolution result:
HERE IS THE LINK WITH THE FIRST LECTURE: Convolution analysis of a Linear System is performed in the TIME DOMAIN, in which signals are expressed by the IMPULSE FUNCTION and the associated IMPULSE RESPONSE However, just like Signal Analysis, also Linear Systems analysis can be performed in the FREQUENCY DOMAIN In that case, signals are represented by sine waves, and the system response is described by SINE-WAVE RESPONSES!
We recall (again) the SUPERPOSITION PRINCIPLE: (Convolution Integral) (Transfer Characteristic)
Representation of the Linear System in the FREQUENCY DOMAIN: The TRANSFER CHARACTERISTIC Consists of: • AMPLITUDE CHARACTERISTIC • PHASE CHARACTERISTIC The Amplitude Characteristic describes how the amplitude of each sine wave varies with frequency The Phase Characteristic describes how the phase of each sine wave varies with frequency
Example: Transfer Characteristic of a Low-Pass Filter: Model: Frequency characteristic: 1/T T Impulse response 1/T T Step response TIME CONSTANT
Amplitude (d. B) EXAMPLE 2: the PINNA acts as a direction-dependent linear acoustic filter 10 0 -10 Elevation-dependent Elevation spectral shape cues Elevation (deg) +60 +40 +20 (‘earprint’) 0 -20 -40 Frequency (k. Hz)
End second lecture