Assemble et programme la main du robot humanode

Assemble et programme la main du robot humanoïde In. Moov Atelier NUMOK Bibliothèque

Le challenge !!!!!! Assembler 2 mains du robot In. Moov et leur donner vie ! Par équipe de 5, chacun va assembler un doigt du robot. Les 5 doigts ainsi constitués seront réunis pour faire une main qui pourra être programmée.

Avant de bricoler… • Qu’est ce qu’un robot ? – Un robot est un dispositif alliant mécanique, électronique et informatique et accomplissant automatiquement soit des tâches dangereuses, pénibles, répétitives ou impossibles pour les humains, soit des tâches plus simples en les réalisant mieux que ce que ferait un être humain. • Mot tchèque « robota » qui signifie « travail, besogne, corvée » .

Les différent types de robot

Le robot domestique • Robot aspirateur Roomba 616

Le robot industriel • Bras robot Kuka

Les robots explorateurs Mars Pathfinder Explorateur de canalisation

Les robots humanoïdes Ocean One a été conçu pour descendre jusqu’à 100 m de profondeur Asimov
 Planète interdite")
QUIZZ : Robot Réel ou Robot de cinéma ? explorateurs Robby (1959) Planète interdite CINEMA Atlas Boston Dynamics REEL i. Cub REEL

QUIZZ : Robot Réel ou Robot de cinéma ? explorateurs C 3 PO / Star Wars CINEMA Gagnant 2016 DARPA challenge REEL Geminoid - Hiroshi Ishiguro REEL

Le créateur d’In. Moov • Gaël Langevin / Sculpteur Designer 2012 Création d’une main 2013 Bras, buste et tête 2014 Estomac, logo et carte électronique Nervo Board 2015 Intégration tablette et du dos, roue pour le déplacement 2016 Des Jambes pour travailler sur la marche et un chat bot

Il sait faire quoi ce robot ? Il voit –> grâce à une Web Cam Il entend –> avec un micro Il parle – via 2 x Haut parleur et un amplificateur Il bouge –> actionné par 30 servo moteurs Il exécute des mouvements pré-programmés appris grâce à la kinect • Il discute et va cher des réponses sur Internet (Chat Bot) : petits jeux / météo / raconter des blagues … • Il apprend grâce à son IA = Intelligence Artificielle • • • In. Moov est un robot permettant l’apprentissage de la robotique

Vidéo

Les particularités du Robot In. Moov • Un robot « OPEN SOURCE » que l’on peut construire soi-même – Les plans sont disponibles sur le Internet inmoov. fr – Les pièces du robot sont imprimables avec une imprimante 3 D – Une communauté de personnes s’entraidant pour construire et améliorer In. Moov • Comme on le construit soi-même, on sait le réparer et on peut l’améliorer ou le personnaliser My. Robot Lab Blender

Des clones d’In. Moov sur toute la planète ! Plus de 300 robots répertoriés dans 60 pays

Chaque maker lui donne une personnalité

A chacun son In. Moov …

Tout cela grâce à l’impression 3 D et le partage • In. Moov est le premier robot entièrement imprimable avec une petite imprimante 3 D ( 12 x 12 cm) • L’ASTUCE : pour faire une grosse pièce on la découpe, et on l’imprime en plusieurs petites pièces qui seront collés ensemble!

Environ 240 pièces …

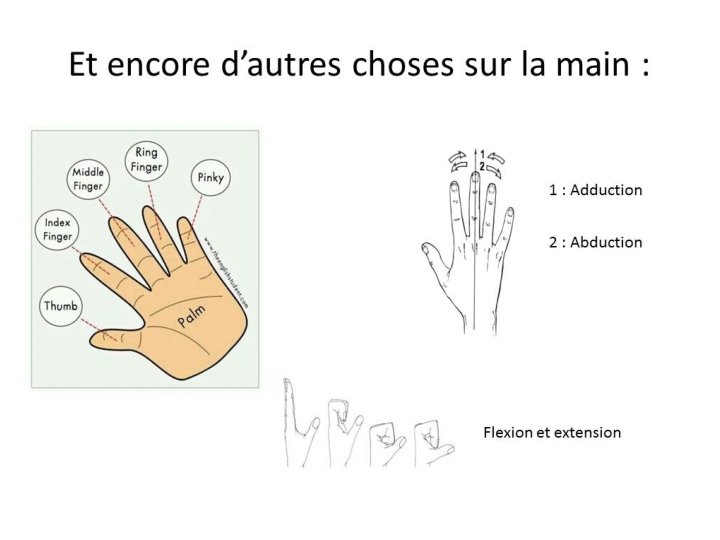
La main humaine – 27 os et 16 articulations Majeur / Middle Finger Annulaire / Ring Finger Index / Index Finger Auriculaire / Pinky Pouce / Thumb

La main d’In. Moov est aussi utilisé pour remplacer une main handicapée

L’assemblage De la main

Matériel pour une main • • • Fil PLA 10 cm à découper et corde pêche pour les tendons (38 cm) Pinces / ciseaux Un pistocolle hacké pour faire les rivets Un Micro contrôleur Arduino + sensor shield 5 x Servos Moteur Tournevis et pince « manucure » Logiciel pour piloter l’arduino Une alimentation de PC pour alimenter les moteurs Un étalonneur de servo moteur

Assemblage : les grandes étapes 1 - Assembler les morceaux de doigt et créer les articulations avec les rivets 2 - Monter le câble sur la poulie (1 fil de pêche de 38 cm) 3 - Faire tourner le servo moteur et le mettre sur point milieu (90°) 4 - Monter la poulie sur le servo moteur comme sur le schéma 5 - Passer les 2 câbles jusqu’au bout des doigts 6 - Ramener la poulie sur la gauche et « doigt tendu » mettre une vis pour fixer les 2 câbles en bout de doigt en tendant bien les câbles 7 – Mettre le doigt à son emplacement sur la main 8 - Connecter le servo moteur sur le Board a un emplacement PIN no 2 à 11 9 – Dans le logiciel Educative LAB, déclarer le mode servo sur la PIN choisie et déplacer le curseur : le doigt doit alors s’animer. 10 – Réglage : ATTENTION pour chacun des doigts il faut configurer les positions maximum et minimum possible, sinon les servos moteurs peuvent forcer et griller…

Le servo moteur, un moteur intelligent… Il ne SAIT PAS faire plusieurs tours… Mais il sait « à la demande » il peut tourner d’un certain angle et maintenir sa position 45° 0° 90° 180° 3 couleurs de fil : MARRON : le – ou G ROUGE : le + ou V ORANGE : la commande ou S ATTENTION : Il faut que le servo moteur soit branché dans le bon sens pour fonctionner.

Assemblage du doigt et création des rivets Fil PLA Insérer photo pistocolle

Passage du câble sur la poulie • Faire en sorte d’avoir la même longueur de câble de chaque côté
 et régler le")
Vérification et réglage de la position milieu • Tester (led 1) et régler le servo moteur (led 2) • Puis emboiter la poulie comme sur la photo Position réglé si la Led 2 est allumée

Insérer le servo moteur • Mise en place de la poulie après réglage de la position du servo à son point milieu

Passage du câble • Passer les 2 fils dans le trou rectangulaire • Et repasser chaque fil dans les 2 petits trous

Tension des tendons - Fixation

Le logiciel • Ouvrir Google chrome, et sur la page application cliquer sur l’ icone Educative lab. • Sélectionner COM XX serial CH 340 pour la connexion à l’arduino

Animation de la main • Configurer chacun des doigts avec sa valeur minimum et maximum • Créer une animation : – l’ouverture / fermeture de la main – L’ouverture (lente) des doigts un par un en partant d’une main fermée – Faire tourner la main de droite à gauche avec le servo moteur du poignet.

Ca vous a plu ? Vous êtes maintenant prêt pour construire un robot In. Moov complet ! www. inmoov. fr

Annexes

S’il reste du temps • Relier à un potentiomètre • Relier à un capteur de pression • Jeux : – On montre une position de main, et c’est l’équipe qui réalise la copie avec la main robot qui gagne.

Le « Cerveau » du robot • IA : Intelligence Artificielle – Programme informatique – My. Robot. Lab • Pilote les moteurs • Analyse les images des caméras • Chat Bot pour la conversation lorsque le robot est connecté à Internet • Etc. • Programmation en JAVA et Python

Détail du fct d’un servo moteur

- Slides: 40