APPLICATIONS OF INDUSTRIAL ROBOTS by ROHINIKUMAR The robots

APPLICATIONS OF INDUSTRIAL ROBOTS by ROHINIKUMAR

The robots are regarded as “Steel collar workers”. The characteristics of work which promote the application of robots are Hazardous work environment Repetitive work Multi-shift operation Handling of heavy parts for short distance.

These factors that demand to use robots are : High precision Heavy payloads Workspace High Speed Reliability Tedium Fail-safe Computer control and Remote operation

Industrial Applications Material Handling 1 Palletizing 2 Packaging 3 Transportation of nuclear waste in Nuclear power plants Machine tending – loading and unloading Welding 1 Spot Welding 2 Arc Welding Spray Painting Inspection 1 Sensor Based Inspection 2 Vision Based Inspection Assembly Mining 1 Earth mining 2 Undersea Mining Non Industrial Applications 1 Business Use of Robotics 2 Domestic applications

Industrial Applications A typical manufacturing system with robot application
 operations. Moving parts from a")
MATERIAL HANDLING These operations are commonly called pick-and-place (pick-n-place) operations. Moving parts from a storage warehouse to machines, Transferring assemblies from one conveyor to another or between a conveyor and a machine, Stacking completed parts or assemblies and other transfer operations.
 A material handling operation in which the primary objective is")
MATERIAL HANDLING(CONTD. . ) A material handling operation in which the primary objective is to move a part from one location to another without any complex constraints is the simplest operation for a robot. The application usually requires a relatively simple robot with few degrees of freedom and a simple controller. In the simplest operation, the part is made available to the robot at a fixed known stationary location and orientation called "pickup" point
 1. The robot end-effector approaches this known location (pickup point,")
MATERIAL HANDLING(CONTD. . ) 1. The robot end-effector approaches this known location (pickup point, point P 1) 2. grasps the part in the end-effector, moves away from this point to safe distance (point P 2) 3. Moves close to the position where the part is to be placed (point P 3) 4. Places the part at the desired location (delivery point, point P 4).
 In the pick-n-place operation it is essential that the part")
MATERIAL HANDLING(CONTD. . ) In the pick-n-place operation it is essential that the part is made available to the robot at the stationary pickup point in the specific orientation and position by some mechanical feeding device or conveyor. The part placed at the delivery position (desired position) is moved away before the next part is delivered by the robot.

MACHINE LOADING & UNLOAING In the machine loading and unloading operation, the timing of the robot and the machine must be coordinated. The robot’s cycle time must match the machine’s cycle time. For this coordination the robot controller must establish communication with the machine or monitor the machine operation with the help of suitable sensors and controllers.

EXAMPLE OF MATERIAL HANDLING IS A LOADING AND UNLOADING IN A MACHINE • The incoming conveyor delivers the parts to a fixed position. • The robot picks up a part from the conveyor and moves to the machine. • The robot loads the part onto the machine. • The part is processed on the machine. • The robot unloads the part from the machine. • The robot puts the part on the outgoing conveyor. • The robot moves from the output conveyor to the input conveyor.

PALLETIZING Robots are frequently used for palletizing and depalletizing. Both palletizing and depalletizing are done under computer control. All four major robot configurations- rectangular, cylindrical, spherical, and revolute - can be used for palletizing. A good solution is to raise the pallet up from the floor level so that the pallet volume is centered in the work envelope of the robot arm. The robots used for palletizing operations can be easily programmed by any off line programming language like VAL. End effectors used for palletizing may be vacuum pickups, magnetic pickups, or even specialized tooling designed to handle a particular part

TRANSPORTATION OF NUCLEAR WASTE IN NUCLEAR POWER PLANTS Adaptive tasks. robots are used for such technological

MACHINE TENDING: LOADING AND UNLOADING 1. Raw material is picked from pickup point on the input conveyor. It is assumed that the raw material is in proper position and orientation on the conveyor. 2. The robot end-effector approaches the raw material, grasps it and moves away from the conveyor. The raw material is moved to loading fixture and is placed in the fixture. The robot moves its arm away from machining center. 3. While machining is done on the part, the robot is idle. 4. On completion of the machining cycle at the machining center, the robot moves in and unloads the finished part from the machining center. 5. The finished part is placed in the pallet. This involves the palletizing operation. 6. The robot moves the end-effector back to pickup point. 7. During steps 4, 5 and 6 the machining center is idle
 Machine loading is usually more demanding than")
MACHINE TENDING: LOADING AND UNLOADING(CONTD. . ) Machine loading is usually more demanding than other material handling applications because part orientation and placement are critical and may require locating mechanisms such as tooling pins and pads and/or sensor logic to guarantee interface between the robot and the serviced machine. An important benefit of robotic machine loading is improved product quality resulting from consistent machine cycles and repetitive short cycle operations. Robots eliminate the inconsistencies of human-paced loading and as a result the cycle can be precisely repeated.

WELDING APPLICATIONS In welding applications, robots can act either as auxiliary machines or as production machines to automate the welding process.

SPRAY PAINTING AND FINISHING The various painting techniques are: Air and airless spraying (spray painting) Electrostatic painting Flow coating Dip painting Electro coating Robots are now being used in many painting and finishing applications worldwide. Labor replacement, consistent quality, energy savings, removal of workers from toxic or harmful substances, material savings, and reduced finishing booth maintenance provide substantial advantages to the industrial user.

SPRAY GUN 1, gun tip; 2, needle stroke adjusting screw; 3, body; 4, paint feed adjusting screw; 5, air inlet connection; 6, paint inlet connection; 7, air feed connection for unlocking needle; 8, gun openings; 9, adjustable needle

INSPECTION Robot inspection involves relative part/sensor manipulation to compare, measure, or detect a physical characteristic of the objective workpiece. Sensors used in robotic inspection include chemical detectors, computer vision systems, infrared detectors, sonar, laser radar, radiation detectors, capacitive proximity sensors, touch probes, X-ray cameras, particle/photon detectors, thread probes, and go-no go gauges
 Two techniques are -Sensor Based Inspection -Vision Based Inspection Robot inspection")
INSPECTION(CONTD. . ) Two techniques are -Sensor Based Inspection -Vision Based Inspection Robot inspection involves relative part/sensor manipulation to compare, measure, or detect a physical characteristic of the objective workpiece. Sensors used in robotic inspection include chemical detectors, - touch probes, computer vision systems, - X-ray cameras, infrared detectors, - particle/photon detectors, sonar, - thread probes, laser radar, radiation detectors, - go-no go gauges - proximity sensors,
 SENSOR BASED INSPECTION VISION BASED INSPECTION Specific physical dimensions can be")
INSPECTION(CONTD. . ) SENSOR BASED INSPECTION VISION BASED INSPECTION Specific physical dimensions can be determined by the robot with the help of sensors placed on the gripper fingers of a material-handling robot A typical robotic system uses a camera to grab the features of a component and take necessary action. The factors to be considered while designing a Vision based inspection system are: Proper lighting of the workspace. Camera with required resolution to extract dimensions and other features to the desired accuracy. The field of view should be large enough to accommodate the part. Robot should have sufficient degrees of freedom to manipulate the camera or the part, as the case is.

ROBOTS IN ASSEMBLY The robots fitted with appropriate tools and auxiliaries can perform the following main operations: slip over/insert; -put on/in; draw apart/unfold; -pick up/place; press in; -screw/un-screw; splice; -rivet; clamp/unclamp; -coat; weld; -dress; orient; -measure; pour.

PRODUCTS PREPARED FOR AUTOMATIC ASSEMBLY: The parts must be sorted out into interchangeable sets allowing their assembly independent of each other. Provision should be made for completely interchangeable assembly The number of mated surfaces and joints must be a minimum The points of attachment of assembly units must be accessible for inspection, where this checking is essential The parts must be made to strict dimensional tolerances since additional machining and fitting operations during assembly are impermissible The sets of parts must allow for sequential assembly by joining all parts in succession to a location piece.

ASSEMBLY SYSTEMS The robots must be able to repeat motions along cylindrical and rectangular coordinates. The work area must be roomy enough to accommodate auxiliaries, assembly jigs, gripper and tool magazines, feeders and part storages, and devices for control of assembly operations. The robots must have not less than three degrees of freedom and provision should be made for robots or assembly tools to perform additional moves, up to five. The control system must ensure extended interface with a large number of auxiliary mechanisms such as index tables, conveyors, piece-by- piece feeders, and the like. The robots that sequentially carry out various operations and manufacturing steps must have automatic tool and gripper replacing mechanisms which can be connected to electric or pneumatic power lines and measuring systems.

MINING Most underground coal mining involves the following five types of operations: Undercutting of the bottom of a coal vein Drilling holes for setting explosive charges in Blasting Bolting the roof Hauling the coal Fig. 9. 20. Mobile drilling-handling robot
; 2, orientation system")
Fig-Mining data-acquisition robot: 1, robot communication and position-control channel (laser beam); 2, orientation system antenna; 7, headlight 3, visual sensor; 8, instrumentation 4, sample; 9, detection and ranging unit 5, analyzer; 6, data-acquisition drilling rig; ; ;

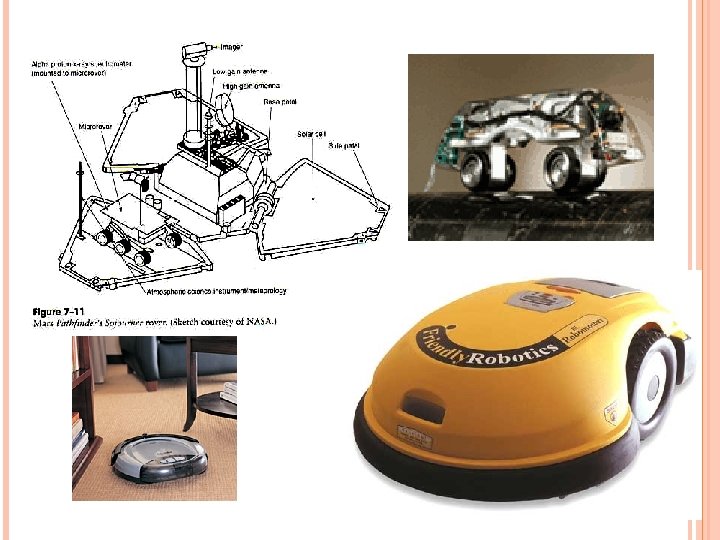
NON INDUSTRIAL APPLICATIONS Business Use of Robotics Space application Medicine Pipeline Robot Sheep Shearing Domestic Applications
- Slides: 28