Applications de linformatique industrielle rseaux et gnie logiciel









 Maintenance Curative Maintenance préventive Réalisée avant la défaillance vise en")
 Suivi de variables Contrôle Surveillance 11")



 locale q")







 Anticiper les problèmes avant qu’ils ne se produisent. § Construire la")











 q Analysis of fault tolerance : The system is runing under")
. FDI Purpose q Objectives : given I/O pair (u,")










 q 1. Détection § Opération logique : On déclare")
![Steps in FDI system (2/4) § Problematic • Given R=[r 1, …. rn] fault](https://slidetodoc.com/presentation_image_h/9e7292b46ea0194421800ca853bd6e98/image-48.jpg "Steps in FDI system (2/4) § Problematic • Given R=[r 1, …. rn] fault")
 q 2. Localisation § Etre capable de localiser le")


 Ib 0 0")








 Control (Vergé, Gawtrop, Dauphin, Sueur, Rahmani.")


 w")
















 adaptive thresholds (t) 82")













- Slides: 95
Applications de l’informatique industrielle, réseaux et génie logiciel Professeur Belkacem OULD BOUAMAMA Recherche : Responsable de l’équipe de recherche MOCIS Laboratoire d'Automatique, Génie Informatique et Signal de Lille (LAGIS -UMR CNRS 8219) Enseignement: Professeur et Directeur de la recherche à Poltech lille Mèl : Belkacem. ouldbouamama@polytech-lille. fr, http: //www. mocis-lagis. fr/membres/belkacem-ould-bouamama Ecole d’ hiver, Université d’Oran 9 -12 décembre 2013 1
Objectifs q Compétences à acquérir § Acquérir les connaissances méthodologiques et pratiques pour la mise en place de systèmes de surveillance en ligne (Détection et localisation de défauts) et hors ligne (Analyse des risques) § Comprendre le fonctionnement des systèmes de supervision en ligne (Système SCADA) évolués § Comprendre les liens entre la maintenance, le contrôle, le diagnostic en ligne, la reconfiguration et l’analyse des modes de fonctionnement et leur criticité § Rôle de l’informatique dans la mise en place d’un système « École d’hiver, Université d’Oran. 9 -12 décembre 2013» Prof. B. Ould Bouamama Polytech Lille 2
Bibliographie § B. Ould Bouamama Conception intégrée pour la surveillance robuste des systèmes. Techniques de l’Ingénieurs AG 3 550, 2013 § Blanke, M. , Kinnaert, M. , Lunze, J. and Staroswiecki, M. (Eds)(2007) Diagnosis and Fault-Tolerant Control, Berlin: Springer-Verlag. § A. K. Samantaray and B. Ould Bouamama "Model-based Process Supervision. A Bond Graph Approach". Springer Verlag, Series: Advances in Industrial Control, 490 p. ISBN: 978 -1 -84800158 -9, Berlin 2008. § M. Ridoux « AMDEC-Moyen » techniques de l’ingénieurs, AG 4220, juin 1999 § B. Ould Bouamama, M. Staroswiecki and A. K. Samantaray. « Software for Supervision System Design In Process Engineering Industry » . 6 th IFAC, SAFEPROCESS, , pp. 691 -695. Beijing, China. § B. Ould Bouamama, K. Medjaher, A. K. Samantary et M. Staroswiecki. "Supervision of an industrial steam generator. Part I: Bond graph modelling". Control Engineering Practice, CEP, Vol 1 and vol. 2. 14/1 pp 71 -83, Vol 2. 14/1 pp 85 -96, 2006. § B. Ould-Bouamama (2009) « Conception intégrée des systèmes de supervision industrielle. Approche bond graph » . REE Revue de l’Electricité et de l’Electronique, N° 4, Avril 2009, pp. 55 -59. § B. Ould-Bouamama (2010) « Diagnostic en ligne à base de modèle Bond graph. » . REE Revue de l’Electricité et de l’Electronique, N° 2, février 2010, pp. 111 -117. § M. A. Djeziri, B. Ould Bouamama, G. Dauphin-Tanguy (2010) “LFT Bond Graph Model Based Robust Control and Diagnosis”, Book Chapter in Springer Verlag, Ouvrage collectif dirigé par Prof. W. Borutzky Bonn-Rhein-Sieg University, sera publié en 2010. 3 Prof. q B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013» Ph. D Thesis, several lectures can be doownloaded http: //www. mocis-lagis. fr/membres/belkacem-ould-
Sommaire q Place du diagnostic et supervision dans l’industrie. q Moyens informatiques et algorithmiques pour la mise en place d’un système de diagnostic temps réel. q Techniques et méthodes pour la conception de systèmes de supervision. q Démonstration d’étude de cas pratiques et de projets industriels et européens, Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013» 4
Partie 1 Place du diagnostic et supervision dans l’industrie. Prof. B. Ould Bouamama Polytech’Lille « Integrated Design of Mechatronic Systems using Bond Graphs» 5
INTRODUCTION : Historique q Depuis 1840: Apparition de l’automatique § Tâches : améliorer la qualité des produits finis, la sécurité et le rendement des unités en implantant des commandes performantes q Depuis 1980, nouveau challenge : Supervision § Rôles : Fournir à l'opérateur humain une assistance dans ses tâches urgentes de gestion des situations d'alarmes pour l'augmentation de la fiabilité, de la disponibilité et de la sûreté de fonctionnement du processus. q. Apparition de l’automatisation intégrée § Commande des systèmes de production et sûreté de fonctionnement, maintenance, gestion technique, diagnostic de fonctionnement Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013»
INTRODUCTION : Automatisation intégrée Aide à la conduite planification, diagnostic interface homme machine Niveau 3 Supervision Niveau 2 Monitoring Suivi de l’état du processus Visualisation Niveau 1 Regulation Commande logique, régulation Optimisation Niveau 0 Décisions Instrumentation Choix et implémentation des capteurs et actionneurs Observations Sortie Entrée Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013»
What is a supervision ? two levels FDI- FTC q Supervision : § Set of tools and methods used to operate an industrial process in normal situation as well as in the presence of failures. q. Activities concerned with the supervision : § Fault Detection and Isolation (FDI) in the diagnosis level, and the Fault Tolerant Control (FTC) through necessary reconfiguration, whenever possible, in the fault accommodation level. SUPERVISION FDI : How to detect and to isolate a faults ? Prof. B. Ould Bouamama Polytech Lille FTC : How to continue to control a process ? « École d’hiver, Université d’Oran. 9 -12 décembre 2013»
Supervision, maintenance et diagnostic Set points FTC Level Fault accommodation Reconfiguration FDI Level On line Fault Detection and isolation List of faults y Sensors Controllers u ur x Maintenance corrective (après faute)
Maintenance (réalisée hors ligne) Maintenance Curative Maintenance préventive Réalisée avant la défaillance vise en effet à réduire les coûts des pannes et de maintenance par un entretien constant et préventif. Prof. B. Ould Bouamama Polytech Lille maintenir les capacités opérationnelles des moyens de production Réalisée après la défaillance d'un bien ou la dégradation de sa fonction. Permet d'accomplir une fonction requise, au moins provisoirement. « École d’hiver, Université d’Oran. 9 -12 décembre 2013»
Supervision Graphical User Interface (Interface Homme Machine IHM) Suivi de variables Contrôle Surveillance 11
Quelques définitions q La sécurité § Ensemble des méthodes ayant pour objet de minimiser ou supprimer les conséquences défaillances sur personnel et équipement q La sûreté de fonctionnement § aptitude d'une entité d'une part, à disposer de ses performances fonctionnelles (fiabilité, maintenabilité, disponibilité) et d'autre part, à ne pas engendrer de risques majeurs. q Supervision ? § Technique industrielle de suivi et de pilotage informatique de procédés de fabrication automatisés. § La supervision concerne l'acquisition de données (mesures, alarmes, retour d'état de fonctionnement) et des paramètres de commande et surveillance des processus généralement confiés à des automates programmables q Logiciel de supervision: § Interface opérateur présentée sous la forme d'un synoptique. Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013»
Pourquoi Superviser ? q contrôler la disponibilité des services/fonctions q contrôler l’utilisation des ressources q vérifier qu’elles sont suffisantes (dynamique) q détecter et localiser des défauts q diagnostic des pannes q prévenir les pannes/défauts/débordements (pannes latentes) q prévoir les évolutions q Suivi des variables Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013»
Fonctions de la supervision q. GESTION § ERP : Enterprise Resource planning : planification des ressources de l'entreprise • intégration des différentes fonctions de l'entreprise dans un système informatique centralisé configuré selon le mode client-serveur. § MRP : Manufacturing Resource Planning : planification des capacités de production • Système de planification qui détermine les besoins en composants à partir des demandes en produits finis et des approvisionnements existants q. PRODUCTION § SCADA : Supervisory Control & Data Acquisition § PC & PLC Process Control/ Programmable Logic Controller Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013»
Supervision et Monitoring q Monitoring § Suivi de paramètres § Sécurité (diagnostic) locale q Réguler § Control des paramètres q Supervision § Centralise le monitoring local et le contrôle § Deux parties d’un SCAda • hardware (collecte de données) • Software (contrôle, surveillance, affichage etc. . ) Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013»
Logiciels de supervision q Wonderware § Leader dans le domaine de la supervision et du SCADA, notamment au travers du logiciel In. Touch, q INTouch § Logiciel de supervision de référence. Bibliothèque extensible contenant de graphiques prêts à l’emploi. base +500 symboles q PANORAMA : § IHM ergonomique, module de traitement des alarmes et des évènements, un module d'exploitation des historiques. q Win. CC § Système de supervision doté de fonctions échelonnables, pour la surveillance de processus automatisés, offre une fonctionnalité SCADA complète sous Windows q DSPACE MATLAB-Simulink Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013»
Caractéristiques d’un SCADA q. Simplicité, convivialité q. Solveurs q. Traitements graphiques (icônes, bibliothèques, … q Supervision § Commande § Surveillance § Traitement des alarmes q. Archivage q. Programmation q Performances/Prix : § Prix : matériel + système d ’exploitation, logiciel, mise à jour, assistance, documentation Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013»
Placement de capteurs Etapes de réalisation d’un système de supervision Analyse des Modes de Défaillance, de leurs Effets et de leurs Criticités (AMDEC) Liste des équipements pertinents Analyse hors ligne des conditions de surveillabilité et de reconfigurabilité Résultats des conditions de surveillabilité Elaboration du système de supervision Algorithmes de surveillance Test en ligne du système de supervision
Partie 2: Techniques et méthodes pour la conception de systèmes de supervision. Prof. B. Ould Bouamama Polytech’Lille « Integrated Design of Mechatronic Systems using Bond Graphs» 19
Analyse des risques q Rôle du responsable d’un processus à haut risque § § § Identifier les risques Quantifier les risques Définir le degré d’acceptabilité de chaque risque Définir la faisabilité et le coût de l’amélioration de la sécurité Mettre en place des actions de sécurisation de certains risques q Différentes méthodes § Analyse préliminaire des risques (APR) preliminary hazard analysis (PHA) § AMDE Analyse des Modes de Défaillance, de leurs Effets (Failure mode and affect analysis) § AMDEC (FMECA) Analyse des Modes de Défaillance, de leurs Effets et de leur Criticité § Hazard and operability study (Hazop) « École d’hiver, Université d’Oran. 9 -12 décembre 2013» Prof. B. Ould Bouamama Polytech Lille 20
Sécurité et risque Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013» 21
AMDEC : Méthodologie et définitions q L'Analyse des Modes de Défaillance, de leurs Effets et de leur Criticité (AMDEC) § outil de sûreté de fonctionnement (Sd. F) et de gestion de la qualité. AMDEC est la traduction de l'anglais FMECA (Failure Modes, Effects and Criticality Analysis, § Analyse des Modes de Marche et De leur Criticité. Technique d’analyse, en maintenance prédictive, permettant de détecter à l’avance, les points faibles d’un système, afin de l’améliorer ou de prévoir les pannes à venir. Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013» 22
Objectifs q 1) Anticiper les problèmes avant qu’ils ne se produisent. § Construire la qualité des produits fabriqués ou des services rendus. § Favoriser la maîtrise de la fiabilité en vue d’abaisser le coût global. § remettre en question le fonctionnement, sans attendre un incident § Evaluation de la fiabilité et détermination des points critiques q 2) Mieux appréhender les risques de défaillance et ainsi les éviter en mettant en place : § des éléments de secours (redondance) § des technologies + performantes Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013» 23
Défaillances dans une PAC Filtre Compresseur Décrochage et surtension de rotor en tournant Détendeur Charge Air H 2 Humidificateur Fuites H 2 Défaut Correcteur Dégradation de pile: réversible; irréversible Séparation de phase Panne de refroidissement Anode FRC Cathode TRC Sortie H 2 Condenseur PRC Défauts Actionneur Air Réservoir Échappement Eau
Exemple : Pile à Combustibles 25
Percement de la membrane Oxydation du support du catalyseur Agglomération et Migration catalyseur ou ou Dégradations propriétés physicochimiques de la membrane Réactions Parasites Manque de réactifs Bouchon d’eau dans les canaux Assèchement Accumulation d’eau dans les zones de diffusion Sur stœchiométrie Haute T Basse T Poisons ou Manque d’eau ou Trop d’eau ou ou ou Bouchon d’eau dans les canaux Pression diff. Distribution irrégulière de la densité de courant Sous stœchiométrie
Analyse du graphe q Défaillance gestion de l’eau § Grandeur à surveiller importante § Car tous les chemins mènent à cette dégradation q 3 niveaux de défaillances § 1. Dégradations irréversibles (événements redoutés) § 2. Dégradations réversibles • FDI doit en temps réel détecter ces défauts avant niveau 1 § 3. Causes défaillances § Thermique , fluidique et chimiques (gestion des flux des réactifs) Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013»
Exemple de mise en oeuvre Composant Modes de défaillance Causes possibles Effets Vanne Bloquée fermée Grippé Vidange Arrêt prod. Bloquée ouverte Encrasement Risque de débordement Moyen de détection Surveillance des opérateurs Niveau de Observacriticité tions Moyen Elevé Système de sécu. Criticité : C=Fx. Gx. N vanne LH S PR C capteur § Probabilité d’occurrence (F) § Probabilité de non-détection (G) § Niveau de gravité (N) 28
Logiciels de AMDEC q Logiciels AMDEC : fonctions § Stockage centralisé des données et intégration avec les autres outils logiciels de fiabilité § Planification basée sur la fiabilité (DFR) § Analyse des modes de défaillance et de fiabilité (FMRA) • TDC FMEA propose tous types d’AMDEC au sein de la même licence logicielle : AMDEC Produit, AMDEC Process, AMDEC Moyen, diagrammes de flux • Skill Designor Pro : Logiciel pour créer, tenir à jour et capitaliser les études AMDEC - FMEA. • Logiciel Skill HACCP (connu dans l’agro alimentaire) • Logiciel Sfmea Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013» 29
CONCLUSION L'AMDEC est donc un outil de prise de décision raisonnée dans un cadre d’amélioration de la qualité de 3 types : -> Préventives -> Correctives -> Amélioratives L'AMDEC « produit » , par l'analyse des pannes, la fréquence d'apparition et les temps d'arrêt favorise : Une conception intégrant la maintenance Améliore la fiabilité et les performances Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013» 30
Avantages et inconvénients de AMDEC q Avantage § permet de mener des actions préventives, c’est à dire de résoudre les problèmes avant que ceux-ci ne se présentent. Si cette méthode est suivie tout au long du cycle de vie du produit, la production en sera améliorée et débarrassée de problèmes majeurs. q Inconvénients § nécessite une connaissance poussée de la question à étudier. En général, un brainstorming avec plusieurs personnes impliquées de la conception à la livraison du produit est nécessaire. Pour cela, il faut donc qu’une équipe puisse se mettre d’accord sur les modes de défaillance étudiés. Cette méthode est, de ce fait, lourde à mettre en place. Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013» 31
Surveillance en ligne Prof. B. Ould Bouamama Polytech’Lille « Integrated Design of Mechatronic Systems using Bond Graphs» 32
Fault Accomodation Supervision FTC: Fault accommodation FDI Controller parameters Ref. Controller u Process Y
Reconfiguration FDI New control configuration Process Yref New Controller u' Y Y’ CONTROL Y’ref Nominal Controller u Supervision FTC: Fault Reconfiguration
FT (Fault Tolerance) q Analysis of fault tolerance : The system is runing under faulty mode § Since the system is faulty, is it still able to achieve its objective(s) ? q Design of fault tolerance : § The goal is to propose a system (hardware architecture and sofware which will allow, if possible, to achieve a given objective not only in normal operation, but also in given fault situations. Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013»
Fault Detection and Isolation (FDI). FDI Purpose q Objectives : given I/O pair (u, y), find the fault f. It will be done in 3 steps : q DETECTION § detect malfunctions in real time, as soon and as surely as possible : decides whether the fault has occured or not q ISOLATION § find their root cause, by isolating the system component(s) whose operation mode is not nominal : find in which component the fault has occured q DIAGNOSIS § diagnose the fault by identifying some fault model : determines the kind and severity of the fault Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013»
Relation entre FDI et FTC Y 2 REGION DANGEREUSE Fault PERFORMANCES REQUISES Reconfiguration REGION DANGEREUSE PERFORMANCES DÉGRADÉES REGION DANGEREUSE PERFORMANCES INACCEPTABLES Y 1 Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013» 37
T + NON 37 0 OUI Diagnostic - Examen clinique FDI: Medical interpretaion
Etapes de FDI Détection : Fonctionnement normal Modèle - + Est ce réellement une faute? Alarmes cahier des charges DECISION Composant défectueux Type de panne DIAGNOSTIC Localisation : Que composant est déféctueux ? Identification : Quel type de défauts 39
Méthodes de surveillance Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013»
Méthodes de surveillance sans modèle q Méthodes de reconnaissances de formes § Détermination d’un certain nombre de classes (apprentissage) § A chaque classe est associé un mode de fonctionnement (normal, défaillant) § Chaque donnée prélevée est affectée à l’une de ces classes : détermination du mode de fonctionnement Exemple : surveillance d’une conduite d’alimentation 2) : Phase surveillance temps réel 1) : Phase d’apprentissage D 1 Débit : Q(t) * ** ++ + * ** * +++** * * +* *+** +* ++ *+ + D 2 41
Commentaires q Only experimental data are exploited § Methods : statistical learning, data analysis, pattern recognition, neuronal networks, etc. q Problems § need historical data in normal and in abnormal situations, § every fault mode represented ? ? ? § generalisation capability ? ? Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013»
METHODES QUALITATIVES q Utilise la connaissance intuitive du monde : § appliquer des modéles de pensée humaine pour des systèmes physiques § Exemple : « Quand la pression augmente, le débit augmente » q L'avantage principal des méthodes qualitatives: § possibilité de n'utiliser que le modèle qualitatif: aucun besoin de grandeurs numériques des paramètres ni de connaissances profondes sur la structure du système. q Inconvénients § Les défaillances des capteurs ne sont pas détectées. Il n'est pas aisé de déterminer les valeurs limites inférieures et supérieures de déviation. D'autre part un problème combinatoire peut apparaître lors des procédures d'inférences pour les systèmes complexes. Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013»
Méthode à base de modèle MODEL OF THE NORMAL OPERATION Process actual operation ALARM GENERATION S E N SO R S RESIDUAL GENERATOR 0 ALARM INTERPRETAION Detection Isolation Identification
Méthodes de surveillance à base de modèle Exemple : surveillance d’une conduite d’alimentation Phase 1 détermination d’un indicateur de faute (Hors ligne) Phase 2 Implémentation en ligne 45
Analytical redundancy : How to generate ARRS ? q What is ARR ? q Given q The ARR express the difference between information provided by the actual system and that delivered by its normal operation model. r u y q What is Residual ? Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013» 46
Steps in FDI system (1/4) q 1. Détection § Opération logique : On déclare le système est défaillant ou non défaillant § Les critères • Non détection ou détection trop tardive ➽ Conséquences catastrophique sur le process • Fausses alarmes ➽ Arrêts inutiles de l’unité de production. Plus de confiance de l’opérateur § Test d’hypothèses : La détection se ramène à un test d’hypothèses • H 0 : hypothèse de fonctionnement normal (Domaine de décision D 0) • H 1 : hypothèse de fonctionnement défaillant (Domaine D 1) • Dx : Domaine de non décision Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013»
Steps in FDI system (2/4) § Problematic • Given R=[r 1, …. rn] fault indicators • Two distributions are known p(Z/H 0) and p(Z/H 1) • One of two hypotheses, H 0 or H 1 is true § What to do ? • Verify if each ri (i=1, . . n) belongs to p(Z/H 0) and p(Z/H 1) • 4 possibilities Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013»
Steps in FDI system (4/4) q 2. Localisation § Etre capable de localiser le ou les éléments défaillants § Les critères • Non isolabilité ➽ Conséquences catastrophique sur le process • Fausses isolabilité ➽ Arrêts inutiles de l’unité (ou de l’équipement) défaillant. Plus de confiance de l’opérateur de maintenance q. Identification (diagnostic) § Lorsque la faute est localisée, il faut alors identifier les causes précises de cette anomalie. On fait alors appel à des signatures répertoriées par les experts et validées après expertise et réparation des dysfonctionnements. Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013»
Specifications Objectives Performances Constraints Prof. B. Ould Bouamama Polytech Lille Which parameters must be supervized ? What are the non acceptable values ? false alarm missed detection delay Available data other (cost, complexity, memory, . . . ) « École d’hiver, Université d’Oran. 9 -12 décembre 2013»
Redondance analytique et matérielle Redondance matérielle F 1 Sensors Detection Isolation S 1 or S 2 S 3 S 2 S 1 R F 2 Redondance analytique ? Monitorability analysis r 1 r 2 F 1 S 1 1 1 0 1 Valve R F 2 1 1 0 0 1 Leakage 1 51
Detectability and isolability Ø Faults and ARR Fault Signature Matrix (FSM) Ib 0 0 1 Mb 1 1 1 F 1 S 1 Leak. Valve R F 2 ARR 1 1 1 0 ARR 2 0 1 1 Ø Signature vectors Ø Hamming Distance C: Binary coherence vector Sj : Signature vector of the jth component to be monitored
Degré d’isolabilité Ø The Hamming distance shows the ability to isolate two faults. Hamming Distance of given example F 1 S 1 Leak. Valve R F 2 F 1 S 1 Leak. Valve R F 2 0 1 0 1 0 1 2 0 1 0 Ø Signature vectors
Observateur et identifiaction y U Residu + - y Modèle y U y + Observateur Residu
Principe de l’observateur PROCESS B C + A OBSERVER B + + K + A C -
Observateur pour le diagnostic u Process Observateur C o m p a r e Residual
Conception intégrée de systèmes pilotés : Démarche Thème 3 Placement de Capteurs et actionneurs Informatisation Propriétés formelles et comportementales Propriétés structurelles et causales Thème 2 Simplificati Commandabili on de té, modèles Observabilité Surveillabilité, Reconfigurabi lité Thème 2 Synthèse de lois de commande Thème 1 Test en ligne Indicateurs de fautes formels Dimensio n-nement
Pourquoi les BGs pour la conception intégrée ? Graphes et Bond Graphs : quelles différences ? Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013» 58
Génération automatique des modèles Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013» 59
Why Graphical Approach for integrated design? q Graphical methods that are based essentially on structural models § Graph structures independent of the numerical values of the syst. parameters. § Structural properties are independent of the values of the system § Structural description of a system expresses only the links between the variables and the constraints § Visualization of the system topology q Many different kinds of models linear, non linear can be used § (qualitative, quantitative, static, dynamic, rules, look-up tables, …) q Lack § Structural analysis produces only structural properties « École d’hiver, Université d’Oran. 9 -12 décembre 2013» Prof. B. Ould Bouamama Polytech Lille 60
State of art BOND GRAPH For MODELLING (1959) Control (Vergé, Gawtrop, Dauphin, Sueur, Rahmani. . ) 1991 Diagnosis Quantitative approche (1995) Qualitative approach (1993) Linkens, Mosterman, Kohda, . . Monoenergy Bond Graph Hybrid Bond Graph (Biswas, (Tagina 95) § Opend loop system § Linear Systems § Sensor and actuator Faults Prof. B. Ould Bouamama Polytech Lille Sizing Mosterman (USA) Coupled BG (Ould Bouamama 198) Ø Robust Diagnosis Ø Extension to coupled BG Ø Automated Diagnosis Ø Design of supervision system « École d’hiver, Université d’Oran. 9 -12 décembre 2013» 61
Partie 4: Applications Prof. B. Ould Bouamama Polytech’Lille « Integrated Design of Mechatronic Systems using Bond Graphs» 62
DC motor as example ELECTRICAL PART ua ia MECHANICAL PART w LOAD 63
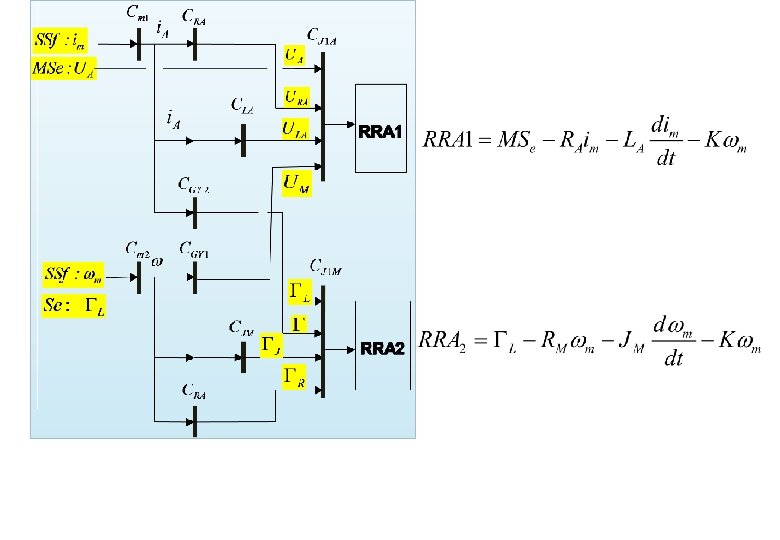
Systematic State equations generation i a m Ra La ua im (J, f) w R: Ra R: f f u. Ra MSe: Ua ua 1 ia u. La Df: im u. M I: La ia ia MGY : K w 1 w J I: J L w Se: - L Df: m 64
Automated Control analysis 65
Algorithme de génération des RRAs à partir du modèle BG ❶ Mettre le BG en causalité dérivée en inversant les causalités des capteurs. R: Ra R: f f u. Ra MSe: Ua ua 1 ia u. La SSf: im u. M I: La ia ia MGY : K 1 J I: J L Se: - L SSf: m 66
OUR DC MOTOR Inductor 67
❷ Ecrire l’équation de jonction de structure 0 et 1 (représentant la conservation de puissance contenant au moins un détecteur
❸ Eliminer les variables inconnues en parcourant les chemins causaux sur le BG de la variable inconnues vers une variable connue (capteur ou source) R: RA R: RM u. Ra MSe: Ua ua u. M 1 u. La SSf: im I: La ia ia MGY : K f 1 J L Se: - L SSf: m I: J
DECISION : Monitorability and Isolability Distance of Hamming
Informatisation FDIPAD
Robustness problem
How to fix threshold ? Seuil simple: 3*std Fonctionnement normal Défaut sur capteur du courant égal à 15% de sa valeur nominale
What about parameter uncertainties ? introduction of 5% of nominal value of RM False alam because of parameter uncertainties !!!!
Linear Fractional Transformation q Any rational expression can be written under LFT form LFT Representation LFT Représentation State space representation Transfert Function 76
Exemple De *: z R R: Rn 9 6 4 1 Df: i I: L Df *: z 3 L 8 L 7 10 M Se: u 2 5 Sf : w MSe: w. R R: R I: Ln 77
Determinist Diagnosis R: R Se: u 2 1 - Se 4 1 1 SSf: i Df: i SSf- 2 -R-2 3 SSf- 3 - L- 3 I: L L R Se: u i A 78
Robust Diagnosis De *: z R R: Rn 9 6 2 i f: 1 4 5 - MSe: w. R 7 - MSe: w. L 7 3 MSe: w. L SSf - 2 - 9 - Rn - 9 - 2 SSf - 3 - 10 - Ln- 10 - 3 10 *: z L 8 De Se: u 5 SS MSe: w. R 1 - Se I: Ln 79
Robust ARRs De *: z R R: Rn 9 6 2 i f: 1 4 7 3 MSe: w. L 10 *: z L 8 De Se: u 5 SS MSe: w. R I: Ln 80
OUR DC MOTOR Inductor 81
Robust ARR From BG DC motor q Uncertain ARRs R(t) adaptive thresholds (t) 82
Resultats de Simulation Residuals in normal operation 83
Resultats de Simulation Réaction des deux résidus robustes suite à une variation des paramètres RA et RM d'une valeur supérieure à leur incertitude relative 84
Resultats de Simulation Réaction des deux résidus robustes suite à une variation des paramètres RA et RM d'une valeur égale à leur incertitude relative 85
Fault detectability index DI q The fault detectability index DI § is the difference in absolute value between the effort (or flow) provided by faults and those granted by all the uncertainties. 86
CENTRALE THERMIQUE 87/13
STEAM GENERATOR P & I DIAGRAM CONDENSER HEAT-EXCHANGER TIR 25 FIR 24 P 3 Environment User TC 5 TIR 27 FIR 23 P 4 Cooling water TIR 26 LIR 19 TIR 21 LIR 18 PR 13 TIR 22 TR 17 ZC 1 PR 12 STEAM FLOW V 2 Aero-refrigerator STORAGE TANK PR 14 TR 38 PR 38 V 1 LC 2 PR 15 FIR 10 PR 27 V 3 TR 29 PR 31 PR 11 TIR 20 TIR 2 LG 3 V 6 V 4 LIR 8 V 5 Condensate V 11 LIR 9 LC 1 V 8 TR 6 BOILER LG 1 V 9 PIR 7 PC 1 FIR 3 FEED WATER Q 4 P 1 TR 5 P 2 60 k. W Thermal resistor V 10 Process delay system LG 2 LIR 1 PC 2 PIR 16
WORD BOND GRAPH OF THE INSTALLATION Voltage source i Condenser-Heat exchanger U Cooling circuit Thermal resistor Boiler Steam expansion Discharge valves Condenser 8993 Feed water circuit Receiver
Logiciel «FDIModel. Builder » for ARR generation
Analyse de la surveillabilité 91
Implémentation temps réel
Fixation des seuils Simple test
Simple test Application de Cu. Sum
Conclusion q La supervision dans l’industrie aujourd’hui § Contrôle : PIDs bien adoptés par l’industrie § Supervision: Grande demande mais confiance encore forte d’abord à l’opérateur § Utilisation principalement de la redondance matérielle et sécurité pars seuil § AMDECs plus connus par les industriels : HSQE q La supervision : quelles compétences ? § Informatique industrielle (API), contrôle et connaissance du process § Gestion des IHMs § Analyse des risques q La supervision dans l’industrie : et demain ? § Bien développée dan l’aéronautique (FDI et FTC) § Rôle des RFID, Informatique et Automatisation intégrée § Télésurveillance, intégration des méthodes à base de données, Prof. B. Ould Bouamama Polytech Lille « École d’hiver, Université d’Oran. 9 -12 décembre 2013» qualitatives et de connaissance