Airborne Gravity Processing 101 Sandra Preaux sandra preauxnoaa

Airborne Gravity Processing 101 Sandra Preaux sandra. preaux@noaa. gov 571 -344 -5792

Outline • What we have: – The Measurement Systems – The Data • What we want: Gravity • How we get there: – – – Conversion From Raw Measurements A Note About Time Correcting for Airplane Motion Correcting for Sensor Orientation Tying into an Absolute Reference Filter

IMU Gravimeter GPS Base Station Or 2 Or 3 GPS Antenna Absolute Gravity Tie • Positioning System – GPS in Gravimeter – GPS in IMU – GPS Base Station • Orientation System – IMU – Gravimeter Platform • Gravity – Main sensor in the Gravimeter

NRL Meter S 93 in NOAA 52 in Florida for GLS 05 Survey, May 2005 NRL Meter S 93 in NOAA 52 in Alabama For GLS 06, January 2006

The Data • Position – Latitude, Longitude, Ellipsoidal Height – And/or GPS X, Y, Z – Velocity and Acceleration • Orientation – Pitch, Roll, Yaw – Platform Cross and Long Acceleration • Gravimeter – Spring Tension, Beam Position, Cross Coupling • Meta Data – Lever Arm between GPS antenna and Gravimeter – Vertical Distance from Gravimeter to Tie Spot – Gravity at the Tie Spot

What do we want from this data? • Gravity, g • g=Gravitation-the Vertical Component of Centrifugal Acceleration • Units: 1 gal = 1 cm/s 2 = 103 mgal 1 mgal = 10 -5 m/s 2 • At the Equator: C=3373 mgal • We want errors in g of 1 to 2 mgal or less www. dinosaurtheory. com/solution. html

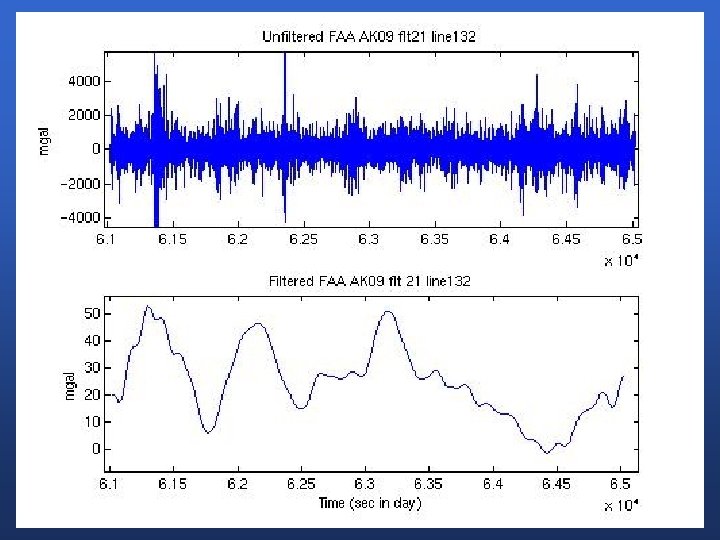
How do we get there? 1. Combine ST, BV, and CC with various manufacturer scale factors to get graw 2. Translate positions from the GPS antenna to the sensor position 3. Synchronize position and gravity measurements 4. Remove Accelerations due to Airplane motion 5. Correct for slight deviation of sensor from level 6. Correct for Instrument Drift and Tie to Absolute Measurement 7. Filter

Synchronizing the Data • More than 95% of the Measured Beam Velocity is due to Aircraft Motion • A Cross-Covariance Analysis finds the best delay for each 4 minute window during the flight to 0. 01 seconds

Airplane Motion • Full acceleration of the airplane in a rotating reference system • Historically Coriolis Centrifugal – r, ω and their derivatives are defined in terms of latitude, longitude and height – The resulting vertical acceleration is then subtracted from graw – Common simplifications reduce computation time with errors smaller than 1 mgal for low altitude, slow flight http: //www. webweaver. nu/clipart/earth 2. shtml

Eötvös Correction East The Vertical Component of: • Coriolis Term • Centrifugal of Airplane Depends on: • Speed • Direction • Latitude • Altitude West

Vertical Acceleration • 2 nd Derivative of Height • Mostly less than 10, 000 mgal • May have spikes to 50, 000 mgal during data collection • May have spikes to 100, 000 s mgal offline

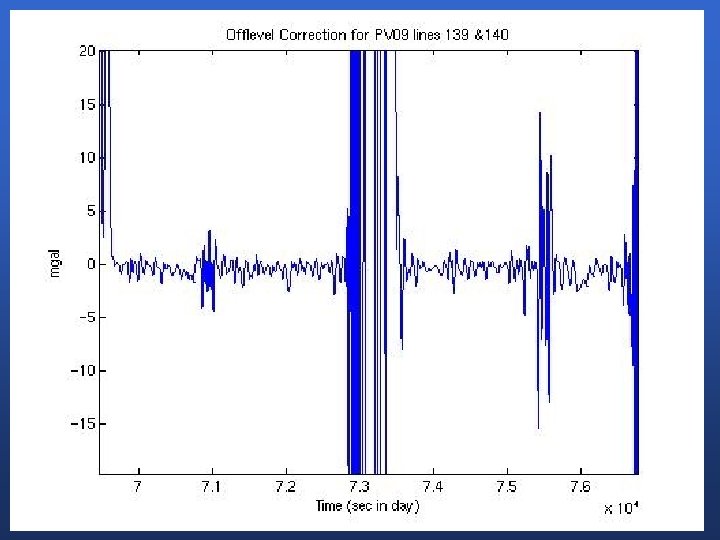
Off Level • If the gravity meter is off level, gmeasured < g • Two ways to correct – Derive off level angle from platform horizontal accelerations – Use the difference in the sum of accelerations between the airplane and the meter to derive the correction

How do we get there? 1. Combine ST, BV, and CC with various manufacturer scale factors to get graw 2. Translate positions from the GPS antenna to the sensor position 3. Synchronize position and gravity measurements 4. Remove Accelerations due to Airplane motion 5. Correct for slight deviation of sensor from level 6. Correct for Instrument Drift and Tie to Absolute Measurement 7. Filter

Thank You
- Slides: 16