Advanced HEV Architectures and Dynamics of HEV Powertrain



















, the speed of the engine is controlled")


 providing 100")
 is shown")
















- Slides: 55
Advanced HEV Architectures and Dynamics of HEV Powertrain
There are various hybrid powertrain architectures which are in use. The general goals of a hybrid transmission design are to realize the different operating modes of a hybrid vehicle system, such as the capability to run motoralone mode, engine-alone mode, combined mode, power split mode, regenerative braking mode, and stationary charging operations.
In addition, it is important to be able to control engine power and speed during hybrid operations so that better fuel economy and lower emissions can be achieved for all ranges of vehicle speeds and power demands. The system design should be easy to implement and control, and bear low overall cost.
Principle of Planetary Gears Many hybrids in the marketplace today use a planetary gear train to replace the traditional automatic transmission such as continuous variable transmission (CVT). The engine, motor, and generator together form a type of transmission that can provide electric continuous variable transmission, known as e. CVT.
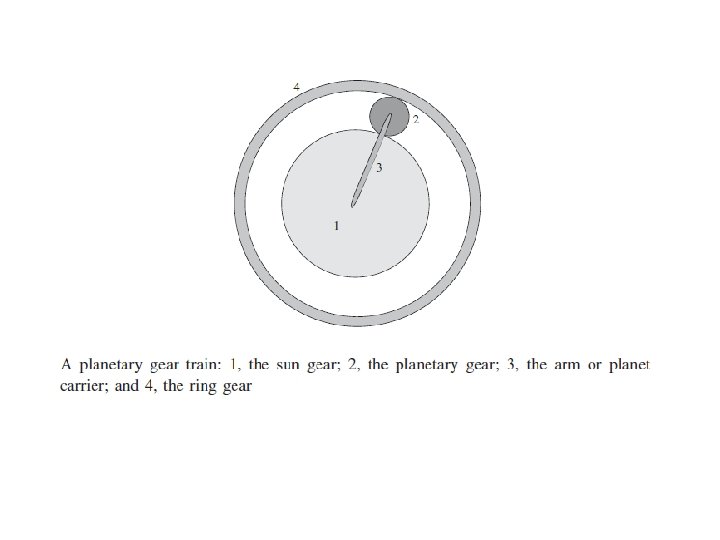
A planetary gear train has one or more planetary gears orbiting around a sun gear or central axis of the train. Therefore, there is a moving axis in planetary gear trains (carrier). A pictorial representation of a planetary train is shown in the following Figure. As can be seen, there are three axes in total: the sun axis, planet carrier axis, and ring axis. The possible relative motions among these axes make planetary gear trains very interesting.
Among the three shafts of a planetary gear train, any shaft can be treated as the input shaft or output shaft. Hence, a combination will be either two input shafts and one output shaft, or one input shaft and two output shafts. In some applications, one of the gear sets is grounded so that only one input and one output is available.
To understand the speed/torque relationships inside a planetary gear train, we can first look at the relationship between a simple set of gears. The linear velocity of the edge of a wheel relative to its center is defined as follows:
In simple gears, two wheels are put in contact with each other. The two wheels will travel at the same linear speeds. Hence, the speed relationship of the two wheels is:
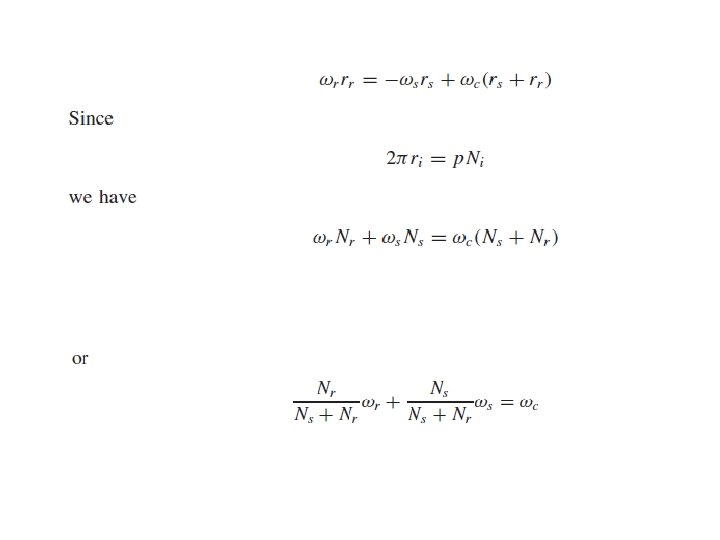
The relationship between a gear’s radius and a gear’s tooth number can be written as 2πri = p. Ni, where N is the tooth number and p is the pitch (arc distance between two adjunct teeth). If gear i and gear j are in contact, then they must have the same circular pitch p in order to transfer the movement. Therefore, we have:
This expression is valid for any gear with an angular movement with respect to one point. For the planetary gear train shown in following Figure, there are two contact points: point A between the sun gear and the planet gear; and point B between the planet gear and the ring gear. The linear velocities of the contact points can be obtained using two different paths for each point:
For point A: For point B:
The directions of the various components’ rotation have been chosen so that the movement of the planetary train is feasible. Thus, we have the following two equations:
After manipulation, we get:
In order to make use of the expression easier, the clockwise direction will be considered positive and the anticlockwise direction negative. As can be seen in the above figure, not all the angular velocities have the same direction. So, we can rewrite the above equation by including the correct reference direction:
As mentioned earlier, two inputs are required before a planetary gear set can be uniquely analyzed. If a gear is grounded, its velocity is zero; nevertheless this zero velocity constitutes one of the input values.
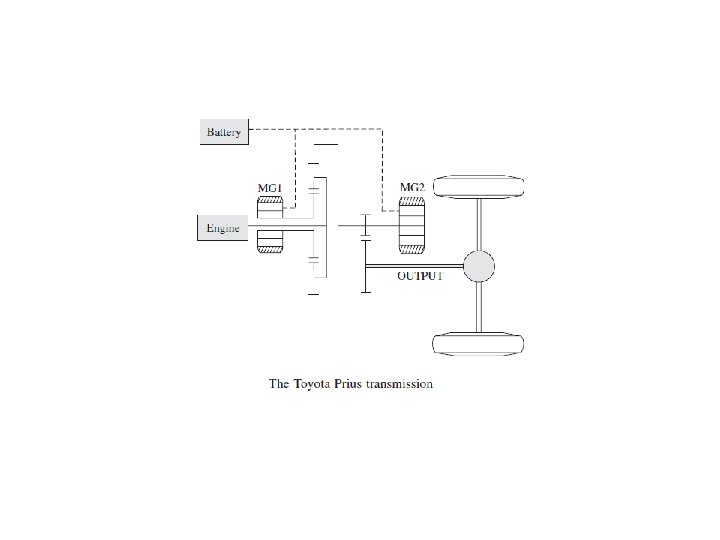
Toyota Prius and Ford Escape Hybrid Powertrain The Toyota Prius and the Ford Escape use similar powertrain transmissions. There an engine, two electric machines, and a planetary gear train in the transmission. The engine is connected to the carrier, electric motor MG 1 is connected to the ring gear as well as the final drive, and the generator MG 2 is connected to the sun gear. Hence, the speed and torque relationships are:
where ωe, ωm, and ωg are the speed of the engine, the motor, and the generator, respectively.
Since there is no clutch, the planetary gear is always running whenever the vehicle is moving. It can be seen from the above equation and the diagram of the powertrain that the speed of the motor is directly proportional to the linear speed of the vehicle through the radius of the front tires and the final drive ratio. The ring gear speed and the motor speed are identical.
There are four different operating modes:
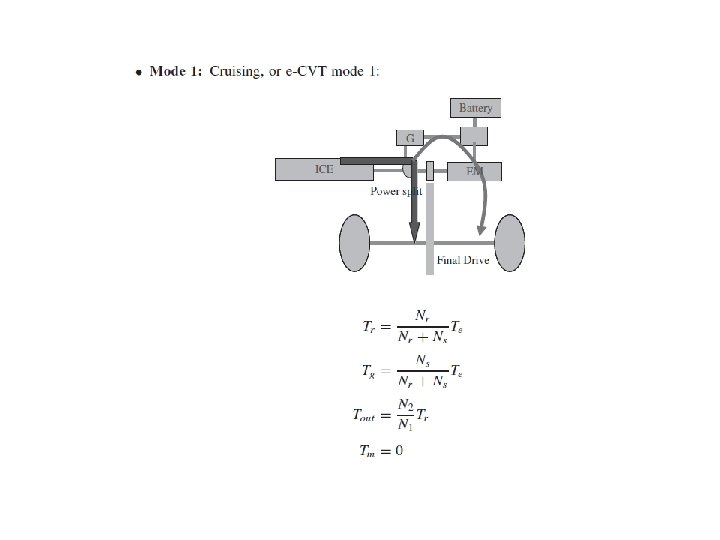
During normal operation (e-CVT or acceleration mode), the speed of the engine is controlled by the torque on the generator. Basically, the generator power is adjusted so that the engine turns at the desired speed. Hence, by adjusting the generator speed, the engine can operate at a relatively constant speed while the vehicle is driven at different speeds.
In the Prius, the engine is limited from 0 to 4000 rpm. The motor is limited by a small negative revolution per minute for reverse and up to 6000 rpm (∼ 103 mph or 165 km/h). The generator is limited to ± 5500 rpm. The ring gear and sun gear each have 78 and 30 teeth respectively. The four planetary gears each have 23 teeth. The final drive ratio is 3. 93 and the wheel radius is 0. 287 m. Hence, ωe = 0. 7222ωm + 0. 2778ωg.
The control strategy is as follows. For a given vehicle speed, and a desired output power determined by the drive cycle, or driver inputs, the desired operating point of the engine can be determined based on the maximum efficiency curve of the engine. From the vehicle speed and engine speed, the desired generator speed can then be calculated. The generator speed is regulated through the inverter by controlling the output power of the generator (either as generator or motor). Motor torque is determined by looking at the difference between the total vehicle torque demand the engine torque that is delivered to the ring gear. The battery provides power to the motors along with the electricity generated by the engine.
Example 1 Consider a planetary gear train-based transmission with an engine (carrier) providing 100 k. W at 2000 rpm optimum operating point. The ring gear has 72 teeth and the sun gear has 30 teeth. The final drive ratio is 3. 7865, and the wheel radius 0. 283 m. (i) For a vehicle speed of 45 mph or 20. 6 m/s, the power demand under heavy acceleration at this speed is 120 k. W. Find the speed and power for each component, assuming no losses. (ii) For a vehicle speed of 70 mph, or 32. 7 m/s, when cruising the power demand is 70 k. W. Calculate the speed and power of each component.
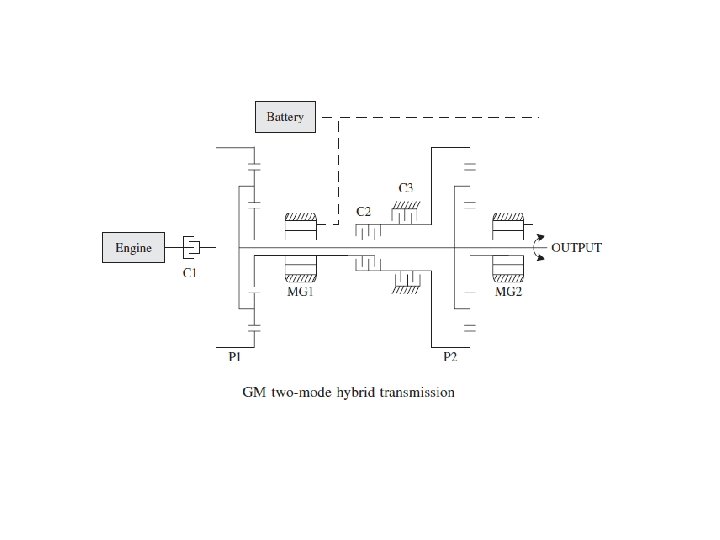
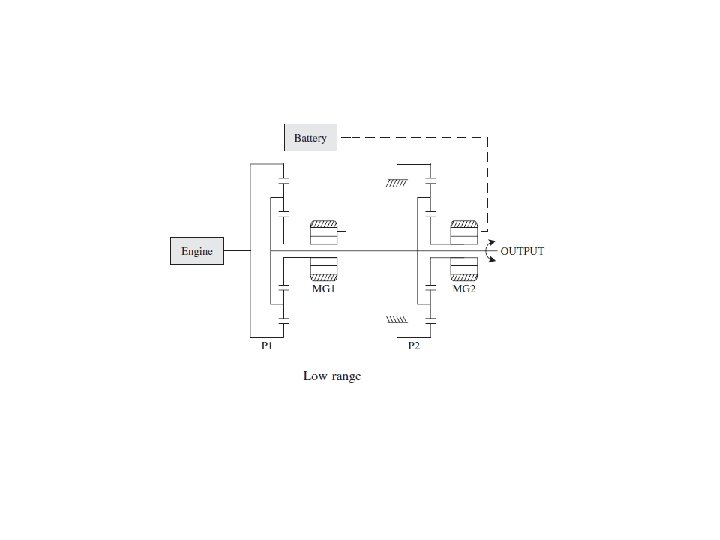
GM Two-Mode Hybrid Transmission The GM two-mode hybrid electric powertrain (or transmission) is shown in the following Figure. This powertrain consists of two planetary gear sets P 1 and P 2; two electric machines MG 1 and MG 2; and three clutches C 1, C 2, and C 3. The powertrain is capable of providing e. CVT for both high-speed and low-speed operations, hence two-mode. The two-mode concept can be referred and compared to the Toyota and Ford hybrid electric vehicle powertrain whose operation is limited to only one mode. In principle, two-mode operation can provide more flexibility for transmission control, increase drivability, improve vehicle performance, and improve fuel economy.
Operating Principle of the Two-Mode Powertrain In the GM two-mode hybrid transmission, the engine is connected to the ring gear of planetary gear P 1 through clutch C 1. Electric machine MG 1 is connected to the sun gear of P 1. The carrier of P 1 is connected to the final drive through the output shaft. MG 2 is connected to the sun gear of planetary P 2. The carrier of P 2 is also connected to the output shaft. There is a dualposition clutch that connects either the ring gear of P 2 to ground, or the ring gear of P 2 to the shaft of MG 1. Through control of C 2 and C 3, different operating modes can be realized. The engine in this system can be kept at the best speed and torque combinations to achieve the best fuel economy by controlling the input/output of the two electric machines. The engine may be stopped or idle during vehicle launch and backup, as well as at low power demand. At cruising conditions, the engine efficiency is further enhanced by cylinder deactivation, also known as Active Fuel Management (GM) or the Multi-Displacement System (Chrysler). Note that this discussion is generic and may not be the same as those implemented in a real vehicle by the automobile manufacturers.
In the following derivations, ω is the angular velocity, T is torque, N is the number of teeth of a gear, and P is power. Subscript s stands for sun gear, r for ring gear, c for planetary carrier, 1 for planetary gear set 1, 2 for planetary gear set 2, g for motor/generator 1, or MG 1, m for motor/generator 2, or MG 2, and out is for output or final drive.
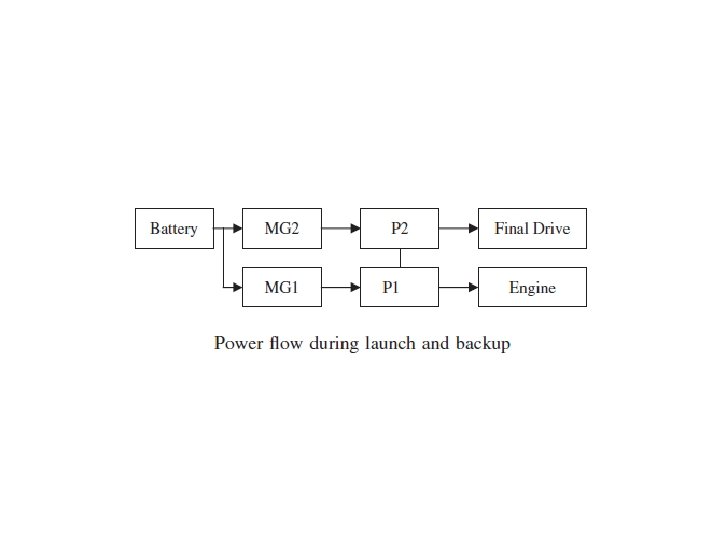
Mode 0: Vehicle Launch and Backup During vehicle launch and backup, the system is operating in motor-alone mode (Mode 0). C 2 is open and C 3 is engaged to ground the ring gear of P 2. In this mode, there are two possibilities for engine operation, either off or idle at cranking speed (approximately 800 rpm) by adjusting MG 1 speed. MG 1 torque is not transmitted to the final drive. MG 2 provides the needed torque to launch the vehicle forward or backward.
The speed/torque relationships are:
In the final implementation, C 1 was eliminated. Therefore, the engine is always connected to the ring gear of P 1. Since the carrier of P 1 is always connected to the final drive, MG 1 needs to be controlled so that the engine is either at zero or at a certain speed:
If the engine is maintained at 800 rpm without fuel injection, there are still friction losses but the engine can be ignited at any time without delay. If the engine is controlled to be at zero speed, then MG 1 will need to be controlled so that the ring gear of P 1 reaches 800 rpm before the engine can be started. In this case, the engine is controlled by cylinder deactivation.
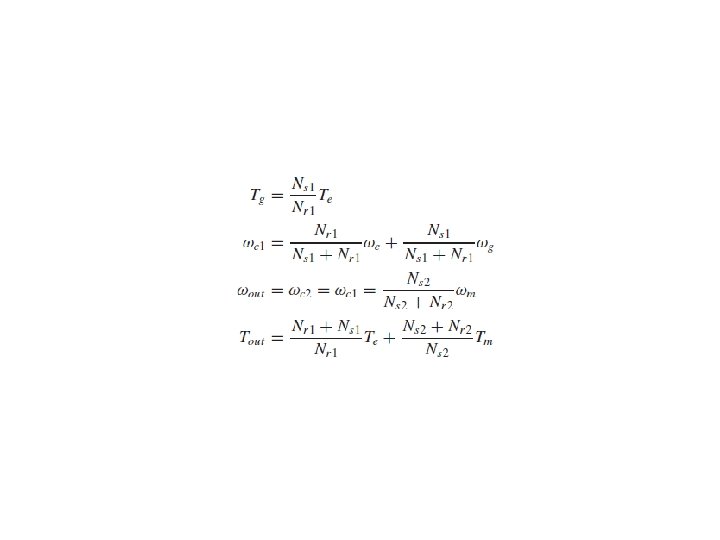
Mode 1: Low Range Mode 1 is also called the low-range or lowspeed mode. In this mode, C 1 is engaged, C 2 is open, and C 3 is engaged. The second planetary gear works as a speed reduction gear for MG 2. The engine may be controlled by partial cylinder deactivation to further save fuel and reduce emissions based on vehicle power demand. The torque and speed relationships during steady state operations can be expressed as:
The different operations in Mode 1 can be described as follows:
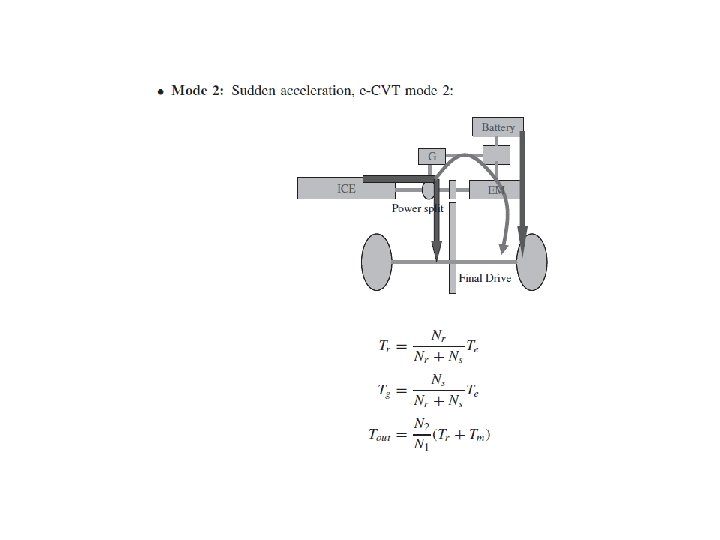
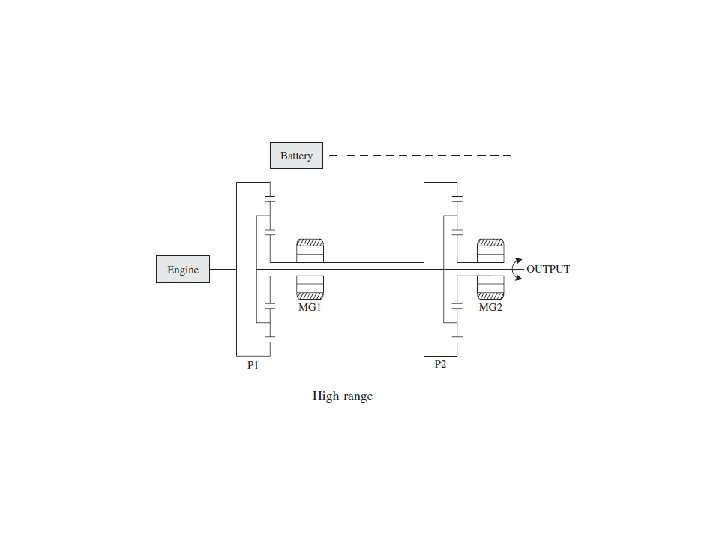
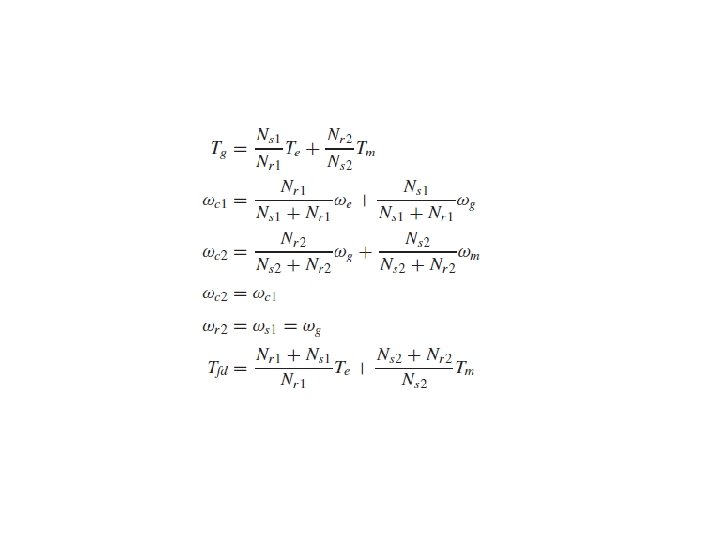
Mode 2: High Range Mode 2 is also called the high-range or highspeed mode. C 1 is engaged, C 2 is engaged, but C 3 is open. In this mode, the sun gear of P 1 is connected to the ring gear of P 2 through MG 1, that is, MG 1, S 1, and R 2 will have the same speed.
In this operating mode, the engine is generally kept at a constant speed to achieve the best fuel economy. MG 1 and MG 2 are controlled in either motoring or generating mode depending on the vehicle speed and power demand. The torque and speed relationships during steady state operation are as follows:
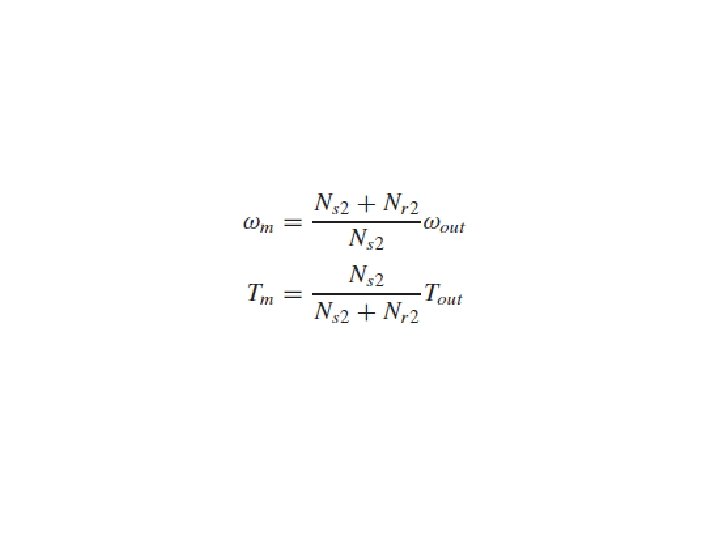
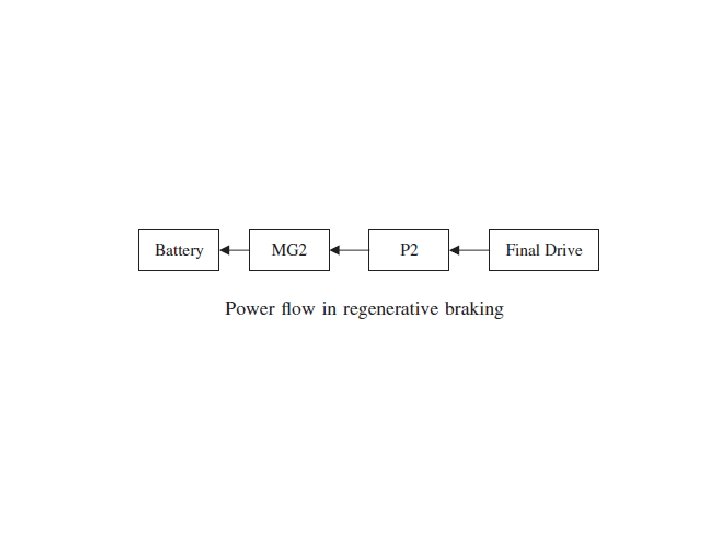
Mode 3: Regenerative Braking During regenerative braking, C 1 is open, C 2 is open, and C 3 is engaged to ground the ring gear of P 2 (Mode 3). The engine and MG 1 are off or freewheel. MG 2 provides the needed braking torque for the vehicle and, at the same time, stores regenerative braking energy in the onboard battery. The speed/torque relationship is:
Hydraulic/frictional braking may be controlled in coordination with regenerative braking to maximize the braking torque and/or maintain vehicle stability and prevent wheel locking. In this case, MG 2 only provides a portion of the braking torque.
Transition from Mode 0 to Mode 3 In general, transition is performed at a condition that can minimize mechanical disturbance to the overall vehicle system. The vehicle is generally launched by MG 2 with the engine off (Mode 0). MG 1 is turned on before transitioning to Mode 1 such that the engine speed reaches approximately 800 rpm. Transition from Mode 0 to Mode 1 is characterized by the engine turning on. This typically happens when the power demand reaches a certain limit such that MG 2 is no longer capable of providing the needed torque. The power demand is a combination of vehicle speed, acceleration demand, vehicle load, and road conditions.
Transition from Mode 1 to Mode 2 happens when the sun gear of P 1 and the ring gear of P 2 reach the same speed. In other words, since the ring gear of P 1 is grounded (zero speed), transition from Mode 1 to Mode 2 will happen when the sun gear of P 1 or MG 1 reaches zero speed. Similarly, transition from Mode 2 to Mode 1 also happens when the speed of MG 1 reaches zero. Transition from Mode 1 to Mode 3, or Mode 2 to Mode 3, is triggered by a braking request from the driver (brake pedal is pressed).
Example 2 Both planetary gear sets have 30 teeth for the sun gear and 70 teeth for the ring gear. The engine is kept at 800 rpm in Mode 0, ramped up from 800 to 2000 rpm in Mode 1, and kept at 2000 rpm in Mode 2. The wheel radius is 0. 28 m. Vehicle speed V is in kilometers per hour and ranges from − 40 to 160 km/h. The final drive gear ratio (including axle) is 3. 3.
Example 3 Planetary gear set 1 has 35 teeth for the sun gear and 65 teeth for the ring gear. Planetary gear set 2 has 30 teeth for the sun gear and 70 teeth for the ring gear. The engine is kept at 0 rpm in Mode 0, ramped up from 0 to 3000 rpm in Mode 1, and kept at 3000 rpm in Mode 2. The wheel radius is 0. 28 m. Vehicle speed V is in kilometers per hour and ranges from − 40 to 160 km/h. The final drive gear ratio (including axle) is 3.