Adjustment of GPS Surveys Global Positioning System Reference

Adjustment of GPS Surveys
 • 24 satellites –")
Global Positioning System • Reference – www. trimble. com (tutorial) • 24 satellites – altitude ~20, 000 km, period ~12 hr, velocity ~14, 000 km/hr • Broadcast: L 1 – 1575. 42 MHz (λ=19 cm) and L 2 – 1227. 60 MHz (λ=24 cm) • Modulated C/A code (chip rate 1. 023 MHZ, 293 m) and P code (chip rate 10. 23 MHz, 29. 3 m)

Signal • • • Carrier C/A code P code Ephemeris Timing signal Miscellaneous information (satellite health, etc. )

GPS Modes • Carrier phase positioning – high precision • Code phase positioning – lower precision, but can use a single receiver

Carrier phase • Good for large, unobstructed areas • Need two or more receivers (relative positioning) • Single or dual frequency (L 1, L 2) • Think of wavelengths (19 cm and 24 cm) as graduations of a scale
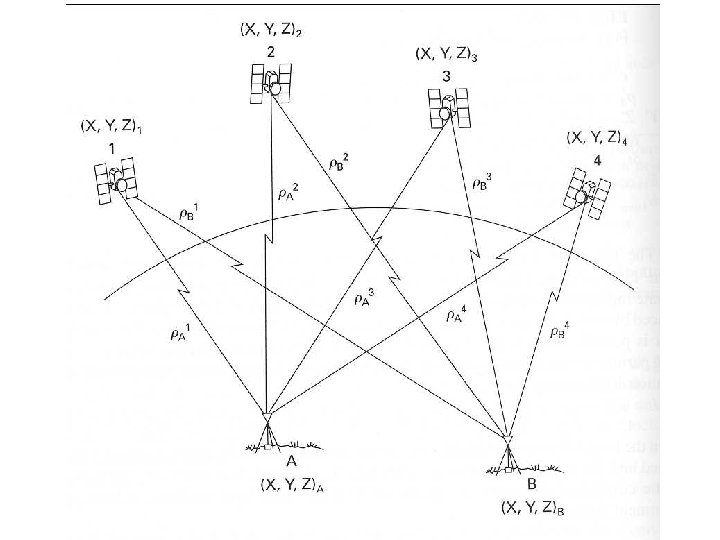

Relative positioning – Carrier • Determines vector from point to point • Relative accuracy of the vectors is a fraction of the carrier wavelength (~1 cm) • We need to connect vectors to control points in order to get coordinates

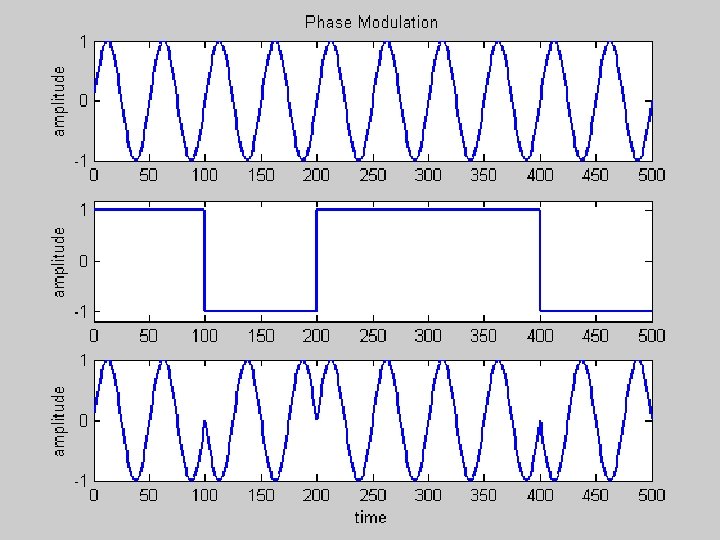
Code Phase • Phase modulation – gives pseudorandom digital signal • C/A code – “chip” length = 293 m • P code – “chip” length = 29. 3 m • Like a ruler with larger graduations

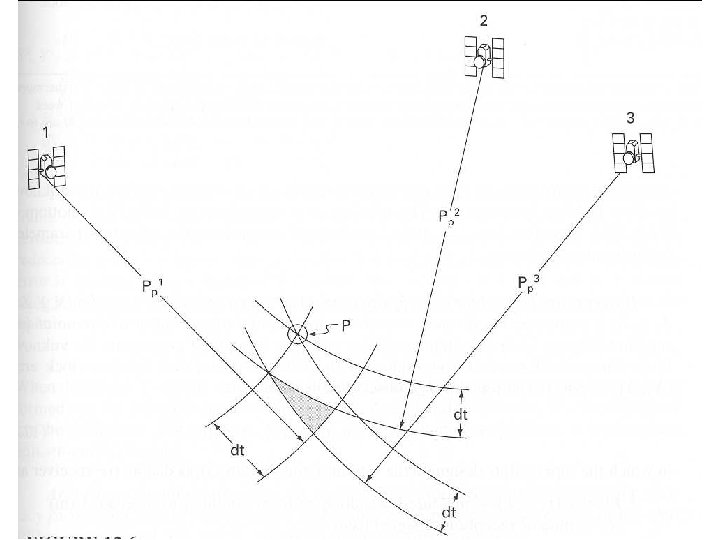
Primary Code Phase Method • Single receiver navigation • With selective availability (pre May 2000), accuracy ± 100 m • Without SA (now) accuracy ± 15 m • Computed by pseudorange solution • Receiver clock error corrected
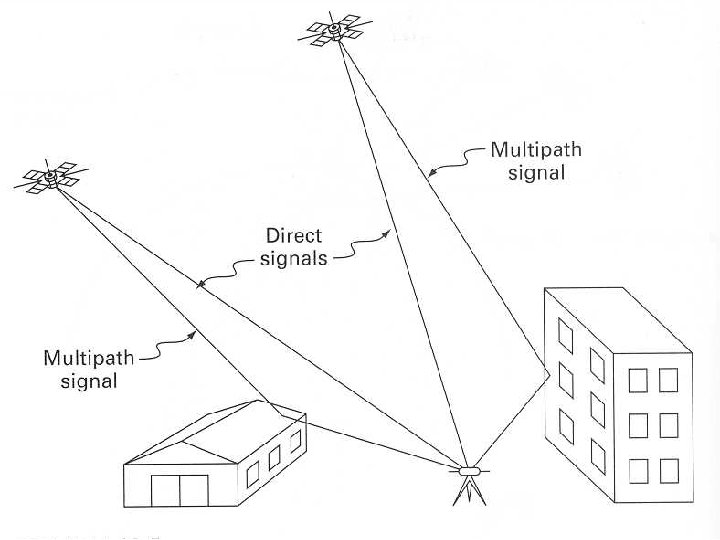
 Multipath Atmospheric and ionospheric effects Cycle")
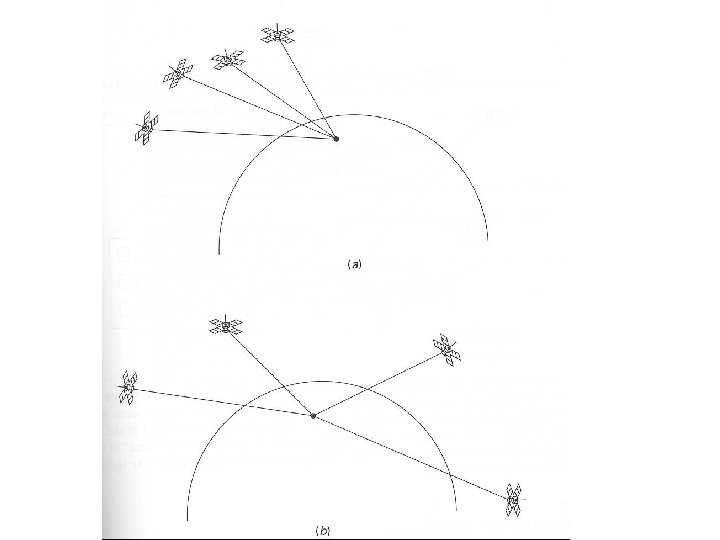
Other Issues • • Dilution of precision (DOP) Multipath Atmospheric and ionospheric effects Cycle slips

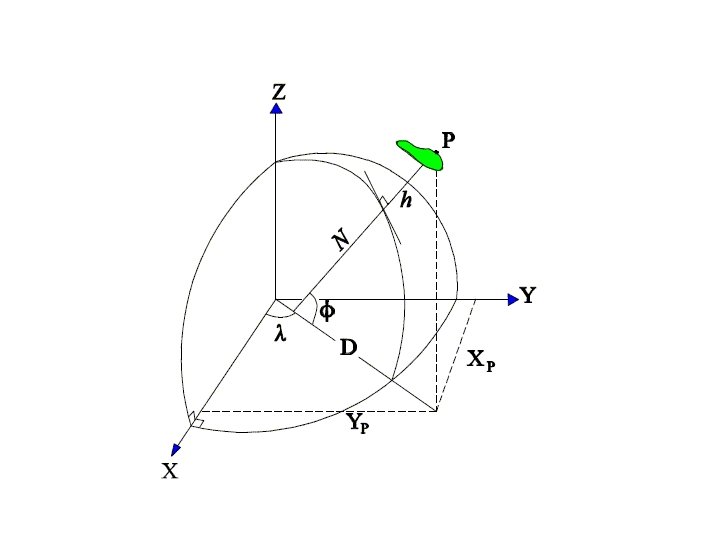
Coordinate System • Geocentric X, Y, Z used for computation – earth-centered Cartesian coordinate system • Conversion to latitude, longitude, and height • Conversion to map projection coordinates

Application of Least Squares for GPS • Least squares adjustment shows up in many areas • Code phase pseudo-range solution • Relative positioning by carrier phase measurements – Step 1 – determine ΔX, ΔY, ΔZ between receivers – Step 2 – use control points and network to compute X, Y, Z coordinates
 Unknowns: XA, YA, ZA, Δt (4 total) Observations:")
Code Phase Pseudo-Range Observation Equation (nonlinear) Unknowns: XA, YA, ZA, Δt (4 total) Observations: Ranges (ρ) to visible satellites for each epoch 5 or more ranges (satellites) result in least squares solution for each epoch

Other Systematic Errors • Speed of light – affected by atmosphere and ionosphere as well as relativity • Satellite time – even atomic clocks have errors • Satellite position – broadcast ephemeris is predicted • Multipath • Other

GPS Vector Networks

Coordinates from a Single Vector If A is a control point, then B can be determined by:

Adjustment of GPS Baselines

Observation Equations For vector from I to J : Observations are very similar to those for differential leveling. The weight matrix is different due to covariance between the X, Y, Z components of the vector.

Observations

AX = L + V

Observation Covariance Matrix

Weight Matrix

Least Squares Adjustment • Form normal equations and solve • Linear equations – no iteration • Compute residuals, standard deviation of an observation of unit weight, and statistics as before

Results

Results - Continued

Results - Continued
- Slides: 31