Actuadores Grados de libertad Cada uno de los

Actuadores

Grados de libertad Cada uno de los movimientos independientes que puede realizar. Numero de articulaciones

Actuadores • Genera movimiento de los elementos del robot • El # actuadores puede ser mayores a los gdl • Un brazo humano • Colocar un objeto de varias formas • El # actuadores puede ser menor a los gdl • Movimiento reciprocante • Hay movimientos imposibles y maniobras

• El movimiento se consige ejerciendo fuerzas • Lo que hace el actuador es parte de lo que hace el robot • Actuadores vs Efectores • Actuadores Hidraulicos, neumaticos, electricos • Potencia, velocidad precision controlabilidad

Actuadores Neumaticos • • • Fluido compresible, aire 5 -10 bares El flujo mueve pistones en cilindro Valvulas neumaticas Seguros, robustos Poca exactitud en la posicion final Difıciles de controlar: • Aire es demasiado compresible • Presion del compresor inexacta

Actuadores Hidraulicos

Actuadores Hidraulicos • • • Aceite mineral a 50 -100 bares Fuerzas y pares elevados, grandes cargas Control muy preciso, continuo. Estabilidad en estatico. Problemas: fugas, mantenimiento.
 y rotor. • Interaccion entre campo magnetico y electrico")
Actuadores Electricos • Estator (imanes) y rotor. • Interaccion entre campo magnetico y electrico provoca movimiento. • Velocidad giro proporcional a Velocidad de brazo. • Propiedes, a mas corriente mas par. • Eficientes para girar con poca fuerza y gran velocidad. • Sistemas digitales lo modulan con PWM(Power width Modulator).

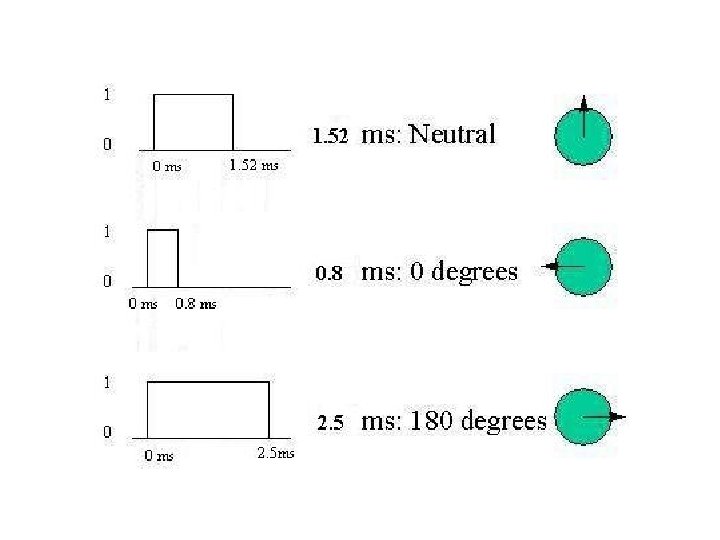
Actuadores Electricos Servo motores • Capaces de colocarse en una posicion. • Motor de DC + engranajes + sensor de posicion + controlador proporcional. • Suelen estar limitados a 180 grados. • 3 hilos: V, tierra, senal. • Se controlan con una serie de pulsos modulados en anchura PCM. • Anchura proporcional a posicion.

Motor electrico, rotor - estator Servo Motor

Modulacion PWM Pulse With Modulation Modulacion anchura de pulso. Velocidad proporcional al promedio. Tiempo de ciclo y ancho de pulso.

Actuadores Controlados • Realimentacion • Proporciona estabilidad – Robustez perturbaciones • Senal de error a corregir

Actuadores controlados Control PID Proporcional al error instantaneo, a su Integral, a su Derivada

Transmision y Reduccion • No existe sistema de transmision especificamente para robotic. • Se utilizan los tipicos Engranajes Para transmitir Movimiento

Rueda Dentada • Cambio de fuerza • Cambio de rotacion

Cremallera y Pinones Rack and Pinion • Cambio de rotacion a movimiento lineal

Escuadras • Cambio de Direccion

Otros Sistemas de Transmision • • Ciguenales Poleas Levas Manivelas Cadenal Diferencial Etc

El Par, Velocidad de Giro y los Engranajes • Combinando engranajes se modifican el par del motor y su velocidad • Relación: #dientes 1/#dientes 2 • w = d 1/d 2 w 1 • T 2 = d 2/d 1 T 1 • Lo que se gana en fuerza se pierde en velocidad

El Par y Reducciones • El motor de radio R y par T genera una fuerza F = T/R perpendicular a su circunferencia • Los motores suelen dar altas velocidades y bajo par. • Los dientes estan bien disenados para evitar perdidas. • Para aplicar una reduccion 3 : 1 se conecta el motor a un engranajede 8 dientes uno de 24. • Se reduce la velocidad por 3 y se aumenta la fuerza tres veces. • Se pueden formar cadenas. • 2 cadenas 3 : 1 consiguen una reduccion 9 : 1

Locomocion • Diferentes actuadores: – Piernas: caminar, arrastrarse, trepar, saltar, etc. – Ruedas: rodar. – Brazos: arrastrarse, trepar. – Aletas: nadar. • Locomocion con piernas es un problema muy grande para la robotica • El robot tiene que ser estable estatica y dinamicamente

Locomocion con Patas Equilibrio Estatico • Equilibrio estatico: si se detiene no se cae. • El Centro de Gravedad debe caer dentro del • poligono de apoyo • Al mover una pata el polıgono cambia. • Modos de caminar, ej paso alternativo en trıpode (hormigas) • Con muchas patas es facil y seguro pero lento e ineficiente

Locomocion con Patas Equilibrio Dinamico • Ser estable en movimiento. • Robot con una pata: saltan, pero no pueden quedar quietos. • Robots bıpedos, cuadrupedos, hexapodos. . . • ¿Cuantas patas estan en el aire durante el • movimiento? • La estabilidad dinamica requiere mas control, pero permite mayor velocidad

Locomocion con Ruedas • Mas eficientes que las piernas, y estaticamente estables. • Las ruedas pueden ser muy sofisticadas: varios neumaticos, cadenas, • con cilindros con otras ruedas, etc. • Mecanismo diferencial (tipo tanque). • Ruedas directrices (tipo coche).

Locomocion con Ruedas

Preocupaciones en Locomocion • Ir a un lugar concreto. • Planificacion de trayectorias – Campo tradicional de la robotica – Es compleja: busqueda y evaluacion de todas las posibilidades. – La geometrıa del robot y su holonomicidad deben considerarse. • Seguir una determinada trayectoria. – puede ser imposible para ciertos robots

Sistemas de Control

Sistema de Control • Mision • Recibir ordenes del usuario para llevar a cabo una tarea concreta, ya sea de forma directa o atraves de un programa

Sistema de Control, cont • La unidad de control esta basada en uno o mas microprocesadores, unidades de entrada y salidas, puertos en serie, paralelos, procesadores especializados, etc • El usuario atraves del programa, ordena al robot realizar una tarea

Ordenes Tipicas • Puntos de destinos • Velocidad de desplazamiento • Tiempo • Frecuencia

Tipos de Controles • Control Cinematico • Control Dinamico

Control Cinematico • Establece cuales son las trayectorias que debe seguir cada articulacion del robot a lo largo del tiempo para lograr los objetivos fijados por el usuario.

Control Dinamico • Tiene por mision procurar que las trayectorias realmente seguidas por el robot sean lo mas parecidas a las propuestas por el control cinematico. • El modelo dinamico de un robot no es lineal, es multivariable, de parametros variantes, por lo que en general su control es extremadamente complejo.

Esquema del Control del Robot • Programa • Generacion de Trayectorias • Control Dinamico • Ordenes a los Actuadores

Componentes del Sistema de control dinamico • • Orden, entrada Controlador, Actuadores Articulacion robot Elementos de retroalimentacion

Sistemas de Potencia Los subsistemas de power tienen como mision mover el manipulador

Sistemas de Potencia • Electricos • Activados con energia electrica • Neumaticos • Energizado con aire comprimido • Hidraulico • Energizado con aceite u otro fluido

Sistemas Electricos Ventajas • • • Confiabilidad Limpieza Grado de Conocimiento Relacion carga/velocidad Economico Desventajas • Sistemas de Transmision son costosos • Los harmonic drives son sistemas precisos que los de engranajes tradicionales

Sistemas Hidraulicos • Se utilizan en robots grandes que tienen que manejar cargas pesadas • Se usa en ambientes hostiles o flamable • Este tipo de robot constituye 25 % de la produccion total

Sistemas Neumaticos • Son mas limitadas debido a que la exactitud se restringe a los extremos del recorrido • Se usa en aplicaciones de pick and place o de secuencia fija • Este tipo de robot constituye 10 % de la representacion robotica en el mercado

El motor Electrico • La mayoria de los robots electricos usan stepper motor o servomotores • Stepper motor tienen la desventaja que se salen de fase a razon de. 5 grd / pulso • Los motores servo estan disenado a menor diametro para tener menor momento de inercia y asi tener mas control, a pesar que no tienen mucha potencia

Sistemas Hidraulicos • Se usaron en los primeros robots, pero su uso se ha reducido atraves del tiempo • El dispositivo servocontrol dirige el sistema hidraulico mediante servovalvulas. Estesproporcionan buena estabilidad en los cambios de voltaje en un tiempo corto • Inconvenientes, cambios en temperatura

Funcion Subsistema de Control • Dirige el sistema de potencia para que mueva el manipulador en una forma predeterminada • Almacena uno o varios programas asi como la informacion recojida durante el proceso • Permiten la comunicacion, ingreso, egreso de datos en forma de pantallas, teclados o medios magneticos

Subsistemas de Control • Nivel Bajo • Relays, air logic, drum secuencer, PLC • Nivel Medio • Servo, poseen entradas (I/O) discretas • Nivel Alto • Interface de programacion • Nivel Expansivo • Mayor Capacidad sensorial e interface
- Slides: 45