A Theory of Predicatecomplete Test Coverage and Generation


![Beyond Statement and Branch Coverage void partition(int a[]) { assume(a. length>2); int pivot =](https://slidetodoc.com/presentation_image_h2/ba2928e598ece04bec961abe340bee4c/image-3.jpg "Beyond Statement and Branch Coverage void partition(int a[]) { assume(a. length>2); int pivot =")
![Beyond Statement and Branch Coverage void partition(int a[]) { assume(a. length>2); int pivot =](https://slidetodoc.com/presentation_image_h2/ba2928e598ece04bec961abe340bee4c/image-4.jpg "Beyond Statement and Branch Coverage void partition(int a[]) { assume(a. length>2); int pivot =")
![Beyond Statement and Branch Coverage void partition(int a[]) { assume(a. length>2); int pivot =](https://slidetodoc.com/presentation_image_h2/ba2928e598ece04bec961abe340bee4c/image-5.jpg "Beyond Statement and Branch Coverage void partition(int a[]) { assume(a. length>2); int pivot =")
![Corrected Program void partition(int a[]) { assume(a. length>2); int pivot = a[0]; int lo](https://slidetodoc.com/presentation_image_h2/ba2928e598ece04bec961abe340bee4c/image-6.jpg "Corrected Program void partition(int a[]) { assume(a. length>2); int pivot = a[0]; int lo")
![Corrected Program void partition(int a[]) { assume(a. length>2); int pivot = a[0]; int lo](https://slidetodoc.com/presentation_image_h2/ba2928e598ece04bec961abe340bee4c/image-7.jpg "Corrected Program void partition(int a[]) { assume(a. length>2); int pivot = a[0]; int lo")

 – the expression")




![Modal Transitions [Larsen] MC MA a may total a’ a’ a a total &](https://slidetodoc.com/presentation_image_h2/ba2928e598ece04bec961abe340bee4c/image-15.jpg "Modal Transitions [Larsen] MC MA a may total a’ a’ a a total &")
 P WP(s, Q) then (P, Q) may Q")







![Example void partition(int a[]) { assume(a. length>2); int pivot = a[0]; int lo =](https://slidetodoc.com/presentation_image_h2/ba2928e598ece04bec961abe340bee4c/image-24.jpg "Example void partition(int a[]) { assume(a. length>2); int pivot = a[0]; int lo =")
![Observation Vector [ lo<hi, lo<=hi, a[lo]<=pivot, a[hi]>pivot ] • lo<hi lo<=hi • lo<hi lo<=hi](https://slidetodoc.com/presentation_image_h2/ba2928e598ece04bec961abe340bee4c/image-25.jpg "Observation Vector [ lo<hi, lo<=hi, a[lo]<=pivot, a[hi]>pivot ] • lo<hi lo<=hi • lo<hi lo<=hi")
![void partition(int a[]) { assume(a. length>2); int pivot = a[0]; int lo = 1;](https://slidetodoc.com/presentation_image_h2/ba2928e598ece04bec961abe340bee4c/image-26.jpg "void partition(int a[]) { assume(a. length>2); int pivot = a[0]; int lo = 1;")


![Generated Inputs void partition(int a[]) { assume(a. length>2); int pivot = a[0]; int lo](https://slidetodoc.com/presentation_image_h2/ba2928e598ece04bec961abe340bee4c/image-33.jpg "Generated Inputs void partition(int a[]) { assume(a. length>2); int pivot = a[0]; int lo")



![New Observation Vector [ lo<hi, lo<=hi, lo=hi+1, a[lo]<=pivot, a[hi]>pivot, a[lo-1]<=pivot, a[hi+1]>pivot ] Only 48/128](https://slidetodoc.com/presentation_image_h2/ba2928e598ece04bec961abe340bee4c/image-37.jpg "New Observation Vector [ lo<hi, lo<=hi, lo=hi+1, a[lo]<=pivot, a[hi]>pivot, a[lo-1]<=pivot, a[hi+1]>pivot ] Only 48/128")














- Slides: 52
A Theory of Predicate-complete Test Coverage and Generation Thomas Ball Testing, Verification and Measurement Microsoft Research FMCO Symposium November 2 -5 2004
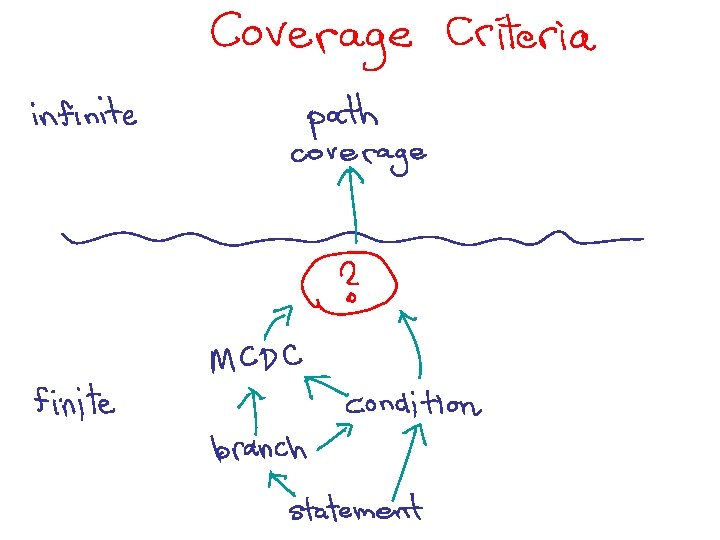
Control-flow Coverage Criteria • Statement/branch coverage widely used in industry • 100% coverage ≠ a bug-free program!! • More stringent criteria – modified-condition-decision, predicate, dataflow, mutation, path, …
Beyond Statement and Branch Coverage void partition(int a[]) { assume(a. length>2); int pivot = a[0]; int lo = 1; int hi = a. length-1; while (lo<=hi) { while (a[lo]<=pivot) lo++; while (a[hi]>pivot) hi--; if (lo<hi) swap(a, lo, hi); } }
Beyond Statement and Branch Coverage void partition(int a[]) { assume(a. length>2); int pivot = a[0]; int lo = 1; int hi = a. length-1; while (lo<=hi) { while (a[lo]<=pivot) lo++; while (a[hi]>pivot) hi--; if (lo<hi) swap(a, lo, hi); } }
Beyond Statement and Branch Coverage void partition(int a[]) { assume(a. length>2); int pivot = a[0]; int lo = 1; int hi = a. length-1; while (lo<=hi) { while (a[lo]<=pivot) lo++; while (a[hi]>pivot) hi--; if (lo<hi) swap(a, lo, hi); } }
Corrected Program void partition(int a[]) { assume(a. length>2); int pivot = a[0]; int lo = 1; int hi = a. length-1; while (lo<=hi) { while (lo<=hi && a[lo]<=pivot) lo++; while (a[hi]>pivot) hi--; if (lo<hi) swap(a, lo, hi); } }
Corrected Program void partition(int a[]) { assume(a. length>2); int pivot = a[0]; int lo = 1; int hi = a. length-1; while (lo<=hi) { while (lo<=hi && a[lo]<=pivot) lo++; while (a[hi]>pivot) hi--; if (lo<hi) swap(a, lo, hi); } }
Predicate-complete Testing • Program predicates – relational expression such as (x<0) – the expression (x<0) || (y>0) has two predicates • Program with m statements and n predicates – m x 2 n possible observable states S – finest partition of behavior based on programmer’s observations • Goal – cover all reachable observable states R S
Reachable Observable States L 1: L 2: L 3: L 4: L 5: L 6: if (x<0) skip; else x = -2; x = x + 1; if (x<0) A;
Upper and Lower Bounds m x 2 n possible states S Upper bound U Reachable states R Lower bound L • Bound reachable observable states R – predicate abstraction – modal transition systems – |L| / |U| defines “goodness” of abstraction • Test generation using L • Increase |L| / |U| ratio
Overview • • • Upper and lower bounds Example Test case generation Refinement Discussion Conclusions
Predicate Abstraction of Infinite-state Systems – Graf & Saïdi, CAV ’ 97 – Abstract Interpretation, Cousot & Cousot ‘ 77 • Idea – Given set of predicates P = { P 1, …, Pk } • Formulas describing properties of system state • Abstract State Space – Set of Abstract Boolean variables B = { b 1, …, bk } • bi = true Set of states where Pi holds
Modal Transitions [Larsen] MC MA a may total a’ a’ a a total & onto a’ a’
Predicate Abstraction if P WP(s, Q) P WP(s, Q) then (P, Q) may Q if P WP(s, Q) then (P, Q) total P if Q SP(P, s) then (P, Q) onto P WP(s, Q) Q Q SP(P, s)
Example
Upper Bound: May-Reachability a b c a may b c may
Upper Bound: May-Reachability a b c a may b c may
Lower Bound a onto b may c total d
Lower Bound a onto b may c total d
Lower Bound a onto b may c total d
Overview • • • Upper and lower bounds Example Test case generation Refinement Discussion Conclusions
Example void partition(int a[]) { assume(a. length>2); int pivot = a[0]; int lo = 1; int hi = a. length-1; while (lo<=hi) { while (a[lo]<=pivot) lo++; while (a[hi]>pivot) hi--; if (lo<hi) swap(a, lo, hi); } }
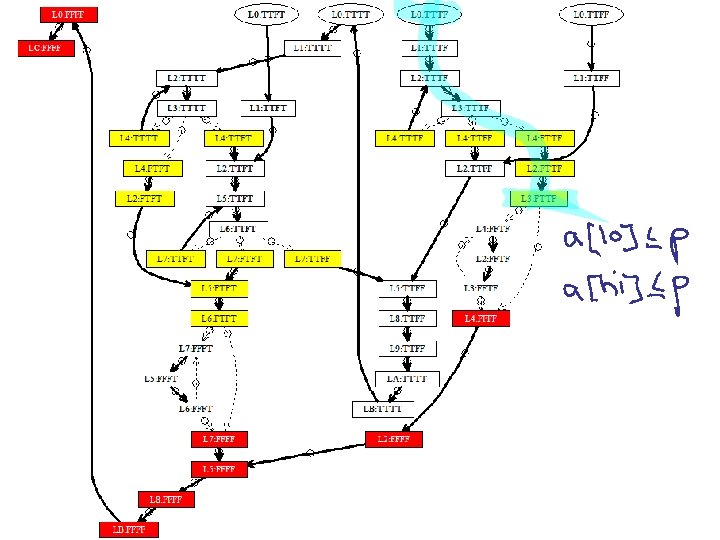
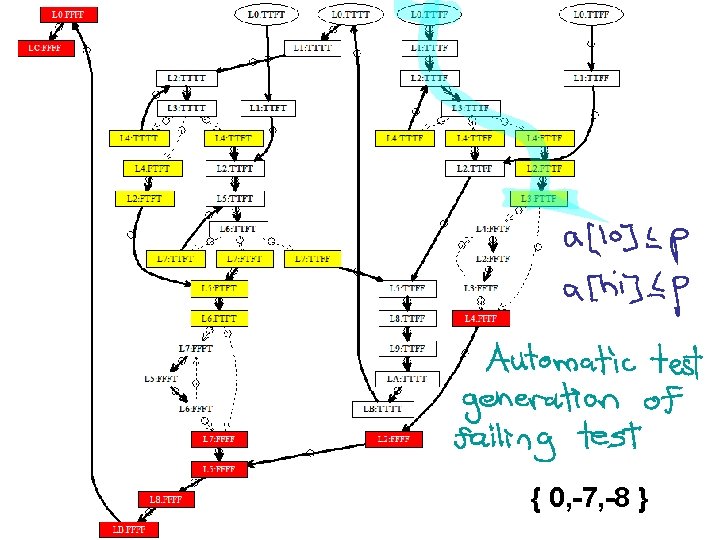
Observation Vector [ lo<hi, lo<=hi, a[lo]<=pivot, a[hi]>pivot ] • lo<hi lo<=hi • lo<hi lo<=hi (a[lo]<=pivot a[hi]>pivot) ( a[lo]<=pivot a[hi]>pivot) Only 10/16 observations possible
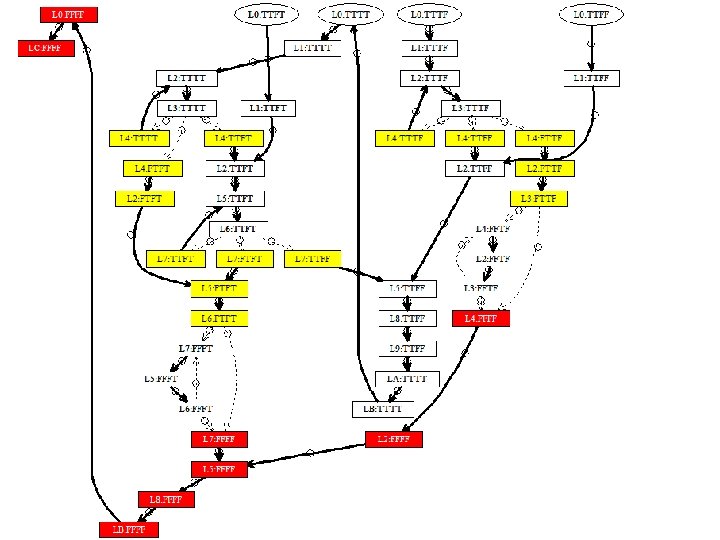
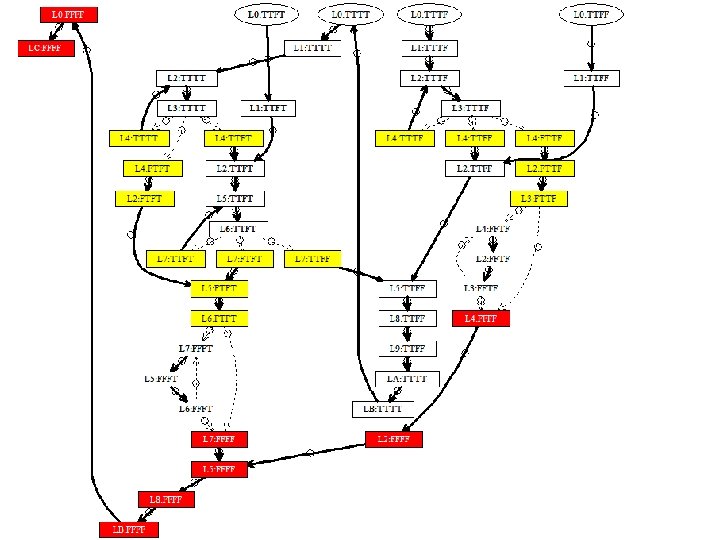
void partition(int a[]) { assume(a. length>2); int pivot = a[0]; int lo = 1; int hi = a. length-1; L 0: while (lo<=hi) { L 1: ; L 2: while (a[lo]<=pivot) { L 3: lo++; L 4: ; } L 5: while (a[hi]>pivot) { L 6: hi--; L 7: ; } L 8: if (lo<hi) { L 9: swap(a, lo, hi); LA: ; } LB: ; } LC: ; } 13 labels x 10 observations = 130 observable states But, program constrains reachable observable states greatly.
Overview • • • Upper and lower bounds Example Test case generation Refinement Discussion Conclusions
Test Generation • DFS of lower bound generates covering set of paths • Symbolically execute paths to generate tests • Run program on tests to find errors and compute coverage of observable states
Generated Inputs void partition(int a[]) { assume(a. length>2); int pivot = a[0]; int lo = 1; int hi = a. length-1; Array bounds violations (L 0: TTTT, L 4: FTFT) (L 0: TTTT, L 4: TTTT) while (lo<=hi) { (L 0: TTTF, L 4: TTFF) ; (L 0: TTTF, L 4: FTTF) while (a[lo]<=pivot) { (L 0: TTTF, L 4: TTTF) lo++; (L 0: TTFT, L 7: TTFF) (L 0: TTFT, L 7: FTFT) ; } while (a[hi]>pivot) { (L 0: TTFT, L 7: TTFT) (L 0: TTFF, L 0: TTTT) hi--; L 0: L 1: L 2: L 3: L 4: L 5: L 6: L 7: ; } L 8: if (lo<hi) { L 9: swap(a, lo, hi); LA: ; } LB: ; } LC: ; } { 0, -8, 1 } { 0, -8, 2, 1 } { 0, -8, 1 } { 1, -7, 3, 0 } { 0, -7, -8 } { 1, -7, 0 } { 0, 2, -8, 1 } { 0, 1, 2 } { 0, 3, 1, 2 } { 1, 2, -1, 0 }
Results • Buggy partition function – U=49, L=43, Tested=42 • Fixed partition function – U=56, L=37, Tested=43 • What about the remaining 13 states?
Overview • • • Upper and lower bounds Example Test case generation Refinement Discussion Conclusions
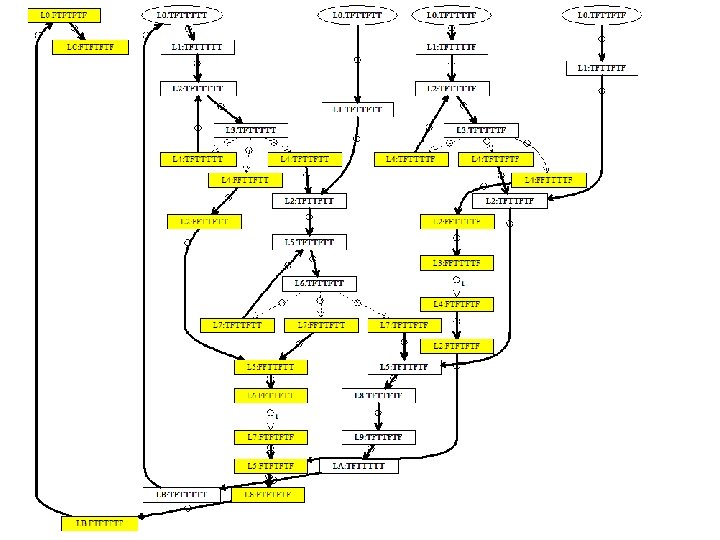
Refinement
New Observation Vector [ lo<hi, lo<=hi, lo=hi+1, a[lo]<=pivot, a[hi]>pivot, a[lo-1]<=pivot, a[hi+1]>pivot ] Only 48/128 observations possible For this set of predicates, L = U
Overview • • • Upper and lower bounds Example Test case generation Refinement Discussion Conclusions
Discussion • Comparison to bisimulation • Completeness of abstractions • Related work
Bisimulation
Bisimulation
Abstraction Completeness
Abstraction Completeness
Related Work • • • Predicate abstraction Modal transition systems Abstraction-guided test generation Symbolic execution/constraint satisfaction Test coverage criteria
PCT Coverage does not imply Path Coverage L 1: L 2: L 3: L 4: L 5: L 6: if (x<0) skip; else x = -2; x = x + 1; if (x<0) A;
PCT Coverage does not imply Path Coverage L 1: L 2: L 3: L 4: L 5: L 6: if (x<0) skip; else x = -2; x = x + 1; if (x<0) A;
PCT Coverage does not imply Path Coverage L 1: L 2: L 3: L 4: L 5: L 6: if (x<0) skip; else x = -2; x = x + 1; if (x<0) A;
PCT Coverage does not imply Path Coverage L 1: L 2: L 3: L 4: L 5: L 6: if (x<0) skip; else x = -2; x = x + 1; if (x<0) A;
Path Coverage does not imply PCT Coverage L 1: L 2: L 3: L 4: if (p) if (q) x=0; y=p+q;
Path Coverage does not imply PCT Coverage L 1: L 2: L 3: L 4: if (p) if (q) x=0; y=p+q;
Conclusions • PCT coverage – new form of state-based coverage – similar to path coverage but finite • Upper and lower bounds – computed using predicate abstraction and modal transitions – use lower bound to guide test generation – refine bounds