A Synthesis of Science Mathematics and Computer Science


 • A disease of excessive demineralization of bone, which on average")






")
")
 COMPENSATORY Angular Vestibulo-Collic Reflex (VCR)")


 Taken from Web Site of Timothy Hain")









")



- Slides: 29
A Synthesis of Science, Mathematics and Computer Science: Medical Applications, Space Exploration and Robotics Theodore Raphan Dept. Of Computer and Information Science Brooklyn College and Graduate Center City University of New York
NASA Roadmap
Bone Loss (Osteoporosis) • A disease of excessive demineralization of bone, which on average starts to take place in both sexes after age 35. Men are less affected. • The decrease in the bone density of postmenopausal women is a much more serious problem, however by age 75, the gap closes where both genders become equally prone for bone loss. • For instance, after sustaining a hip fracture, it is estimated that 20% of patients die within one year, 50% cannot walk any longer without assistance, while 25% may have to be institutionalized in long-term nursing care facilities.
Bone Remodeling • A process where the adult skeleton undergoes a continuous turnover whereby old bone is resorbed by osteoclasts and new bone is formed by osteoblasts. • Osteoclasts are cell types that degrade bone and its protein components by releasing calcium from bone into circulation, where calcium can either remain, or be excreted • Osteoblasts are cell types that synthesizes new bone. • Exercise and Bone Loading is Extremely Important for Bone Health
Bone Loss
Comparison of Normal and Abnormal Bone
Conclusions • Computer Image Analysis is Becoming an Important Technique For early detection of problems of Bone Density and Architecture • The image analysis shows that bone architecture as well as bone density are important factors in bone health • Computer Image Analysis in Three Dimensions shows even greater promise of identifying factors that contribute to osteoporosis by examining its archtecture and density in 3 D.
Sensory Motor Function and Adaptation • Maintains Balance While Walking and Running • Helps See Clearly While Moving or Objects Move • Eye Hand Coordination (Hitting a Baseball) • Many Other Functions
Sensory-Motor Function Necessary For Space Travel
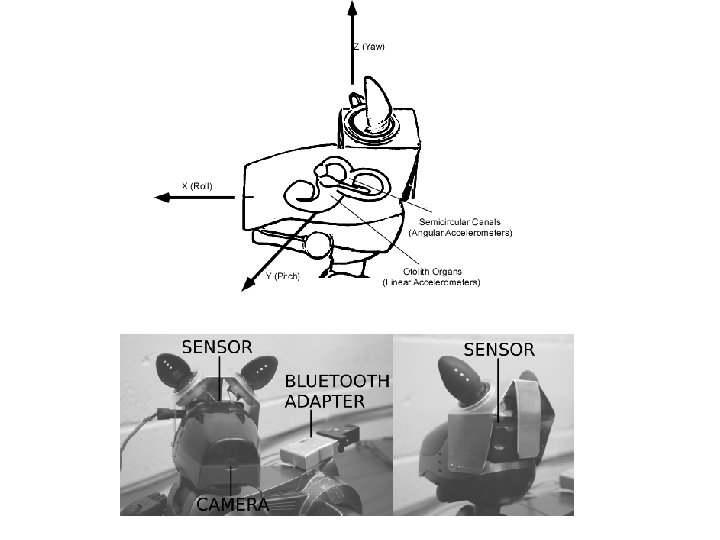
Peripheral Vestibular System (Labyrinth)
Basic Vestibulo-Ocular Reflex (VOR)
COMPENSATORY GAZE MECHANISMS COMPENSATORY Angular Vestibulo-Ocular Reflex (a. VOR) COMPENSATORY Angular Vestibulo-Collic Reflex (VCR) TENDS TO MAINTAIN INVARIANT GAZE DIRECTION HEAD ROTATION TEND TO MAINTAIN INVARIANT HEAD POINTING DIRECTION BODY ROTATION COMPENSATORY Linear Vestibulo-Ocular Reflex (l. VOR) COMPENSATORY Linear Vestibulo-Collic Reflex (l. VCR) TENDS TO MAINTAIN INVARIANT GAZE FIXATION POINT HEAD TRANSLATION TENDS TO MAINTAIN INVARIANT HEAD FIXATION POINT HEAD TRANSLATION
Sensors For Detection Linear Acceleration
VCR In Action Acknowledgement: Video from Ken Money
Benign paroxysmal Positional vertigo (BPPV) Taken from Web Site of Timothy Hain
Epley Maneuver to Cure BPPV Taken from Website of Timothy Hain
Robot Design for Static Stability Inoue-Inaba laboratory Bipedal Robot Wind-Up Toy Walking motion must be done relatively slowly and the robot must be able to balance on one foot. Another way to increase stability is to make the center of gravity as low as possible.
Qrio Robot from SONY Taken from SONY website
Nordic Walking
Rocker Motion in Forward Human Locomotion
Sony AIBO Quadrupedal Robot 1. Utilizes Static Stability 2. Loaded with sensors including color camera, heat sensors, an infrared range finder, touch sensors, acceleration and speed sensors and a stereo microphone. It has 18 joints producing 250 types of movement
Robot and Human Locomotion
Simulated VCR In Robot
Simulated VOR In Robot
Robotis Bioloid (Tribotix)
CONCLUSIONS • Science Utilizes Methodologies in Mathematics and Computer Science To Study a Wide Range of Problems Dealing With Health and Space Travel. • Robotics is a Growing Field and A Number of new Developments in Robot Design is Inspired by Sensory Motion Function • A quadrupedal robot has been outfitted with an artificial vestibular sensor, which monitors head motion and orientation. • A rudimentary compensatory system (program) that can maintain head stability at low frequencies when the robot is moved in space has been implemented • The initial necessary steps have been implemented for developing algorithms for dynamically stable walking in quadrupeds and ultimately for bipeds
Bernard Cohen Mikhail Kunin Marek Marcinkiewicz Yasuhiro Osaki Yongqing Xiang Ravi Kauchik Takao Imai Koji Kudo Simon Parsons Eishi Hirosaki Lawrence Goetz Jizhong Xiao Elizabeth Sklar
Grant Support DC 05222 NIH-NIDCD Vestibular mechanisms in the Dynamics of Locomotion EY 04148 NIH-NEI Multidimensional Dynamics of the Vestibulo-Ocular Reflex P 30 D 2 C 0504 -01 A 1 NIH-NIDCD Core Center NCC-9 -58 NASA through a cooperative Agreement with NSBRI Advanced Techniques for Assessment of Postural and Locomotor Ataxia, Spatial Orientation And Gaze Stability CNS-0520989 NSF - NSF-MRI Acquisition of Bipedal Robot Facility to Support Research into Improvement of Orientation and Stability of Locomotion CUNY-Collaborative grant 80209 -09 -12 Brooklyn College Technical Fee and GRTI Grant NSF 0633497 - CCLI Develocping a STEM Curriculum for Early College Programs: A High School to College Continuum