A Network Approach for Intensity Modulated Arc Therapy
 Athula D. A. Gunawardena, Michael")






 A rotational IMRT system A 1 , A 2,")





- Slides: 22
A Network Approach for Intensity Modulated Arc Therapy (IMAT) Athula D. A. Gunawardena, Michael C. Ferris and Robert R. Meyer University of Wisconsin-Whitewater, and University of Wisconsin-Madison
Radiotherapy: 100 years + � 1896 - Emil Herman Grubbé uses radiation to treat breast cancer - less than one month after public announcement of Roentgen’s discovery of X-rays � 1975 - Mark P. Carol, M. D. develops initial idea for IMRT � 1992 - Computer technology advances allow Carol to prototype the Peacock IMRT system. � 1996 - FDA approval won for Carol’s system 2
Radiotherapy: Impact and Challenges �> 1 million cases of cancer each year in U. S. , and many times that number in other countries �Approximately 40% of U. S. patients with cancer are treated with radiation therapy �Minimizing radiation dose to nearby healthy “organs at risk” (OARs) very difficult 3
Radiation Therapy Goals • High Level Goals: Achieve prescribed radiation to tumor while minimizing dose to the surrounding organs • • Some Additional Goals: Minimize time patient spends on the treatment couch. Minimize beam-on time (time radiation beam in “on” ) Minimize treatment planning time 4
Intensity Modulated Radiation Therapy: A complex RT procedure Radiation delivered from 4 -9 angles selected from 360 possible angles For each of these 4 -9 angles, Intensity Modulated Radiotherapy (IMRT) uses 50 -200 small radiation beamlets each of which is “allowed” to have a different radiation intensity Different beamlet intensities achieved via multiple apertures at each angle 5
Leaf Sequencing in IMRT Multileaf Collimator 6
Common Machine Specific Constraints on Shapes �Single Interval Constraint - Any nonzero row of an achievable shape contains a single interval of ones �Inter-Digitization Constraint -Opposite adjacent leaves cannot cross each other
Intensity Modulated Arc Therapy (IMAT) A rotational IMRT system A 1 , A 2, …, AP : I-maps K=3; the number of sweeps along the arc • A 1 • A 2 • A 3 Would like: • AP • • AP-1 • • • Introduced by C. X. Yu in 1995 as an alternative to Tomo Therapy 8
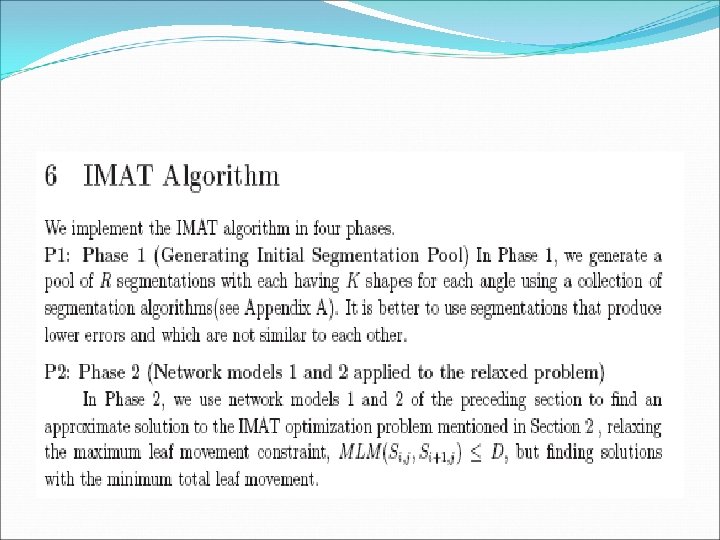
Leaf Sequencing in IMAT • Input • A 1 , A 2, …, AP : nonnegative real matrices K : the number of sweeps through an arc(i. e. , # of shapes per I-map) D : maximum allowable leaf movement between two adjacent angles • Variables • i 1, …, i. K : beam weights for segmentation of Ai, I=1, …, P • Si 1, …, Si. K : binary shape matrices for Ai • Maximum allowable leaf movement between Si, j and Si+1, j D, MLM(Si, j and Si+1, j ) D, and other constraints on Sij. 9
Clinical Prostate Maps
Row-Non-Convexity Measure
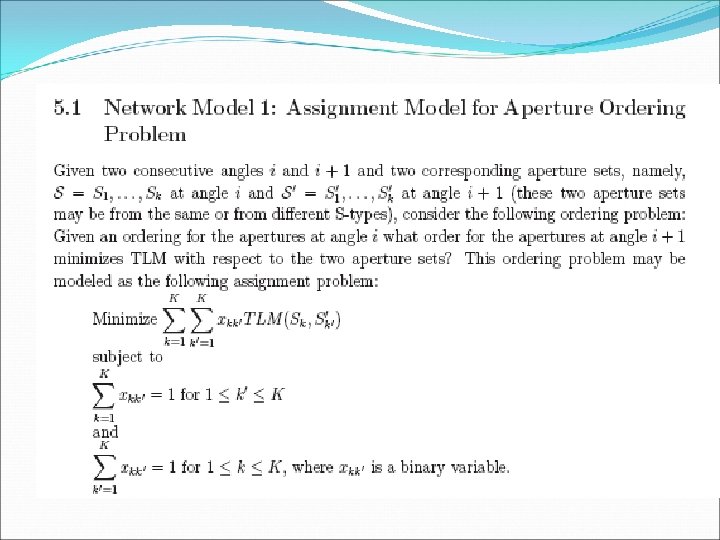
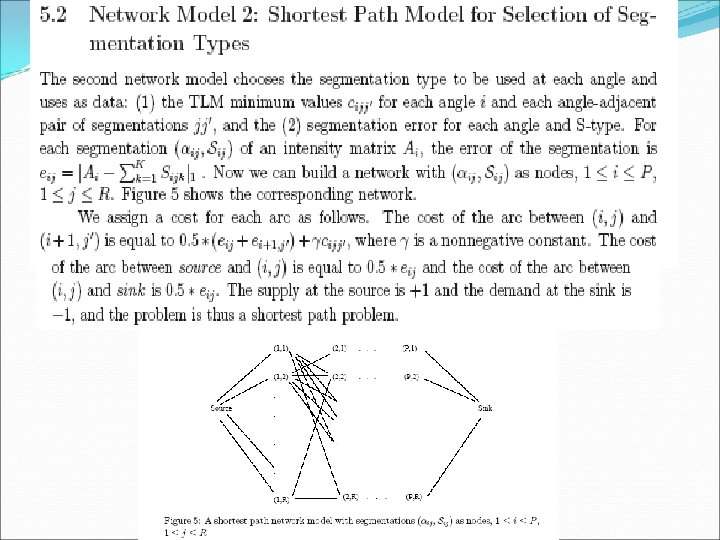
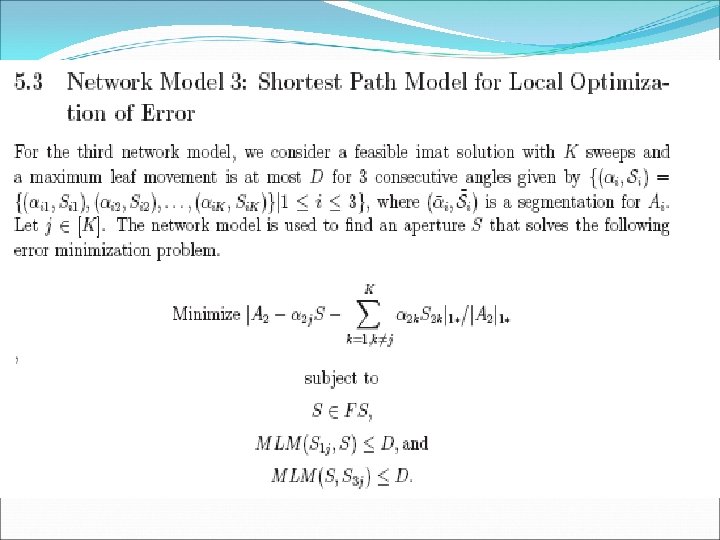
Network Models • Assignment Problems • Transportation Problems • Shortest Path Problems • Maximum Flow Problems • Critical Path in Project Plan Networks • Minimum Cost Flow Problems
Intensity Map Segmentation • Angle 200 Error Map • Angle 260 21