914 Belief Search Heuristics Today Planning graph heuristics

9/14: Belief Search Heuristics Today: Planning graph heuristics for belief search Wed: MDPs

Heuristics for Belief-Space Planning

Evaluating search/planning: Theoretical “Worst-case” “Average-case” § Look at the complexity § Average-case complexity would be better § Worst-case complexity of most search/planning problems is NP-complete or higher. § What would it tell us other than “find something else easier (if less interesting) to do” § Consider formal restrictions on domains under which complexity may be lower. . § These restrictions may not be natural. . § But much harder to analyze § What distribution of problems to use? § Similar issues arise in empirical analyses

Evaluating Search/Planning: Empirical Random problems § Look at actual performance on problems. WHICH PROBLEMS? “Real” or “Benchmark” problems § § Fine as far as the customers of that problem are boss is concerned, but not clear whether the claims will carry over to any other problems § May have to do analysis to figure out what is it about that domain that makes certain approaches work well § Randomly generated problems § Which distribution? (hardest problems may live in small phasetransition regions as in SAT) § Find the phase-transition regions, generate random problems there § But who said such Use “real world” problems § Develop many “benchmark” domains inspired by various real world problems and use them to evaluate the coverage of a planner § Easy to abstract way the critical characteristics when developing benchmarks

Heuristics for Conformant Planning § First idea: Notice that “Classical planning” (which assumes full observability) is a “relaxation” of conformant planning § So, the length of the classical planning solution is a lowerbound (admissible heuristic) for conformant planning § Further, the heuristics for classical planning are also heuristics for conformant planning (albeit not very informed probably) § Next idea: Let us get a feel for how estimating distances between belief states differs from estimating those between states
 In addition to interactions between literals as in classical")
World’s funniest joke (in USA) In addition to interactions between literals as in classical planning we also have interactions between states (belief space planning) Three issues: Need to estimate the length of How many states are there? “combined plan” for taking How far are each of the states from goal? How much interaction is there between states? all states to the goal For example if the length of plan for taking S 1 to goal is 10, S 2 to goal is 10, the length of plan for taking both to goal could be anywhere between 10 and Infinity depending on the interactions [Notice that we talk about “state” interactions here just as we talked about “goal interactions” in classical planning]

Belief-state cardinality alone won’t be enough… § Early work on conformant planning concentrated exclusively on heuristics that look at the cardinality of the belief state § The larger the cardinality of the belief state, the higher its uncertainty, and the worse it is (for progression) § Notice that in regression, we have the opposite heuristic—the larger the cardinality, the higher the flexibility (we are satisfied with any one of a larger set of states) and so the better it is § From our example in the previous slide, cardinality is only one of the three components that go into actual distance estimation. § For example, there may be an action that reduces the cardinality (e. g. bomb the place ) but the new belief state with low uncertainty will be infinite distance away from the goal. § We will look at planning graph-based heuristics for considering all three components § (actually, unless we look at cross-world mutexes, we won’t be considering the interaction part…)

Using a Single, Unioned Graph P P M Q M R R M A 1 A 2 A 3 Heuristic Estimate = 2 Union literals from all initial states into a conjunctive initial graph level P Q R A 1 A 2 A 3 P Q R M M K K L A 4 A 5 L G • Minimal implementation • Not effective • Lose world specific support information

Using Multiple Graphs P A 1 M P M Q M P A 1 P M M K K A 4 • Same-world Mutexes G Q A 2 M M R M K Q A 4 K G R M A 3 R R A 3 M M L L A 5 G • Memory Intensive • Heuristic Computation Can be costly Unioning these graphs a priori would give much savings …
 Labels signify possible")
Using a Single, Labeled Graph (joint work with David E. Smith) Labels signify possible worlds Action Labels: Conjunction of Labels under which a literal holds P M Q M R M of Supporting Literals P Q R M A 1 A 2 A 3 Literal Labels: Disjunction of Labels Label Key Of Supporting Actions True ~Q & ~R ~P & ~Q (~P & ~R) V (~Q & ~R) V (~P & ~Q) P Q R M K L A 1 A 2 A 3 A 4 A 5 Heuristic Value = 5 P • Memory Q Efficient • Cheap R Heuristics • Scalable M • Extensible K Benefits L from BDD’s G

What about mutexes? § In the previous slide, we considered only relaxed plans (thus ignoring any mutexes) § We could have considered mutexes in the individual world graphs to get better estimates of the plans in the individual worlds (call these same world mutexes) § We could also have considered the impact of having an action in one world on the other world. § Consider a patient who may or may not be suffering from disease D. There is a medicine M, which if given in the world where he has D, will cure the patient. But if it is given in the world where the patient doesn’t have disease D, it will kill him. Since giving the medicine M will have impact in both worlds, we now have a mutex between “being alive” in world 1 and “being cured” in world 2! § Notice that cross-world mutexes will take into account the state-interactions that we mentioned as one of the three components making up the distance estimate. § We could compute a subset of same world and cross world mutexes to improve the accuracy of the heuristics… § …but it is not clear whether or not the accuracy comes at too much additional cost to have reasonable impact on efficiency. . [see Bryce et. Al. JAIR submission]

Heuristics for sensing § We need to compare the cumulative distance of B 1 and B 2 to goal with that of B 3 to goal § Notice that Planning cost is related to plan size while plan exec cost is related to the length of the deepest branch (or expected length of a branch) § If we use the conformant belief state distance (as discussed last class), then we will be over estimating the distance (since sensing may allow us to do shorter branch) § Bryce [ICAPS 05—submitted] starts wth the conformant relaxed plan and introduces sensory actions into the plan to estimate the cost more accurately B 1 B 2 B 3

Symbolic Projection A set of states is a logical formula A transition function is also a logical formula Projection is a logical operation

Symbolic Manipulation with OBDDs § Strategy § Represent data as set of OBDDs § Identical variable orderings § Express solution method as sequence of symbolic operations § Sequence of constructor & query operations § Similar style to on-line algorithm § Implement each operation by OBDD manipulation § Do all the work in the constructor operations § Key Algorithmic Properties § Arguments are OBDDs with identical variable orderings § Result is OBDD with same ordering [From Bryant’s slides] § Each step polynomial complexity

BDDs for representing States & Transition Function Belief state as a BDD Transition function as a BDD
![Restriction Execution Example Argument F Restriction F[b=1] Reduced Result a a b 0 d](http://slidetodoc.com/presentation_image_h2/700875ae43c64e0166e2670af5e6f861/image-18.jpg "Restriction Execution Example Argument F Restriction F[b=1] Reduced Result a a b 0 d")
Restriction Execution Example Argument F Restriction F[b=1] Reduced Result a a b 0 d d d 1 c c c 0 1


Don’t look beyond this point

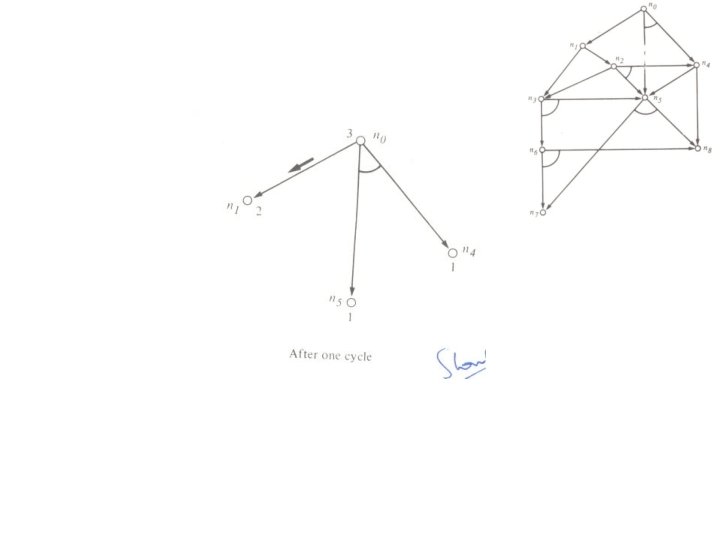
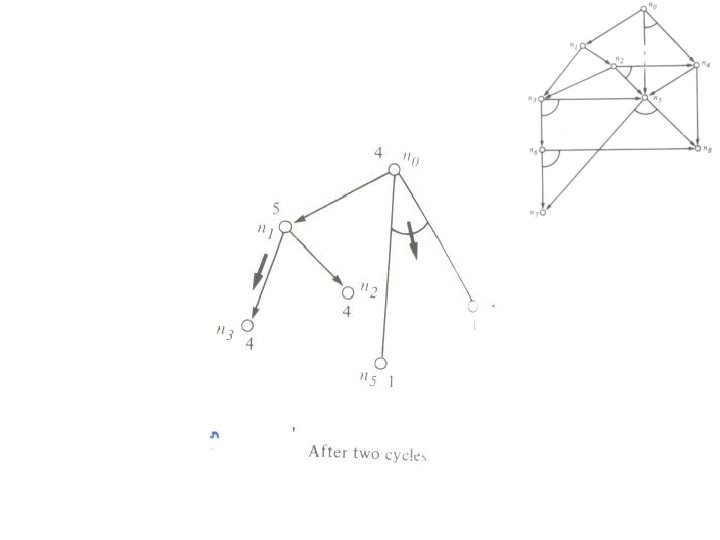
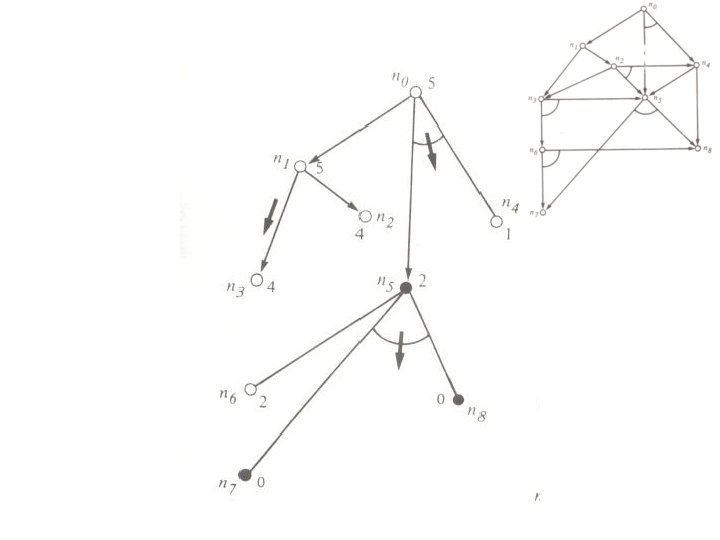
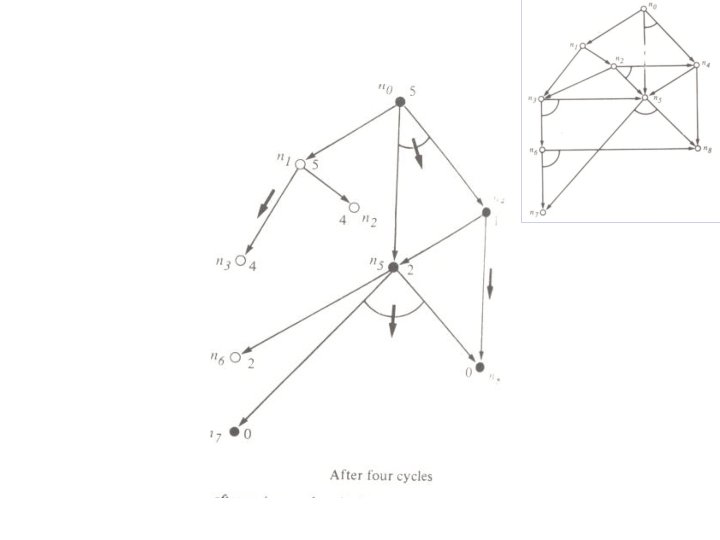
A* vs. AO* Search A* search finds a path in in an “or” graph AO* search finds an “And” path in an And-Or graph AO* A* if there are no AND branches AO* typically used for problem reduction search
- Slides: 25