9 1 Geradengleichungen Jede Gerade besitzt zwei Richtungen
 = { P 3")
9. 1 Geradengleichungen Jede Gerade besitzt zwei Richtungen. G(A 0) = { P 3 | P = l. A 0 mit l } Anstelle eines Einheitsvektors A 0 kann man eben so gut

G = { P | P = l. A + B mit l } Durch zwei Punkte des 3 verläuft genau eine Gerade. G' = { P | P = l(A - B) + B mit l }

P = l. A + B x = lax + bx y = lay + by z = laz + bz

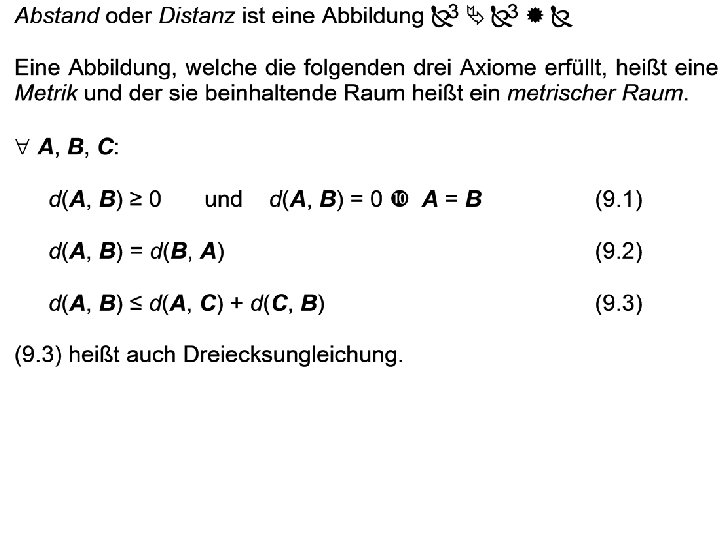
9. 2 Abstand eines Punktes von einer Geraden Abstand d = |N | der Geraden vom Ursprung 0.

N = N 0 |N| = N 0 d N liegt auf der Geraden und gehört daher zu G = { P | P = l. A + B } Gesucht ist der Parameter l. N mit N = l NA + B A und N stehen senkrecht aufeinander A N = 0 = A l. NA + A B = 0.

Für jeden Vektor P G ist das Skalarprodukt mit N 0 die Projektion auf die Normale N 0 P = |P| cos(N 0, P) = d (9. 9) Dieser Gleichung gehorchen alle Geraden, die durch den Punkt N verlaufen und senkrecht darauf stehen. Wählt man eine Ebene aus, indem z. B. z 0 gesetzt wird, so bestimmt (9. 9) eine Gerade in der x-y-Ebene n 0 x x + n 0 y y = d Hessesche Normalform der Geradengleichung für eine Gerade in der x-y-Ebene.

Zur Berechnung des Abstandes zwischen der Geraden G = { P | P = l. A + B } und dem Punkt Q transformiert man alle Geradenpunkte G' = { P' | P' = l. A + (B - Q) } und verfährt weiter wie oben. Q P‘ Kreuzprodukt: Für jeden Vektor P der Geraden gilt |P A 0| = d also auch für B oder, wenn der Abstand des Punktes Q von der Geraden gesucht ist, für B – Q |(B - Q) A 0| = d

9. 3 Ebenengleichungen Eine Ebene, die den Ursprung enthält, wird durch zwei Vektoren A 0 und B 0, aufgespannt, sofern die Vektoren nicht zu ein und derselben Geraden gehören, sofern also l : A l. B. Die Ebene ist dann gegeben durch E(A, B) = { P | P = l. A + m. B mit l, m } Ebene, die drei beliebige Punkte A, B, C enthält: E(A, B, C) = { P | P = l(A - C) + m(B - C) + C mit m, l }

Normalenvektor N 0 und ein Punkt A: Sei N 0 = mit |N 0| = 1 und A = Jeder Punkt P = E. E erfüllt: N 0 (P - A) = 0 N 0 P - N 0 A = 0 N 0 P = N 0 A = d In Komponenten erhalten wir die Hessesche Normalform der Ebenengleichung nxx + nyy + nzz = d

9. 8 Welche Achsenabschnitte besitzt diese Ebene? [Hinweis: Den Achsenabschnitt der x-Achse findet man, wenn man in der Hesseschen Normalform für Ebenen y = 0 = z setzt. ]
 auch Platonischer Körper genannt. Durch reguläre Polygone")
9. 4 Reguläre Polyeder Reguläres Polyeder (Vielflach) auch Platonischer Körper genannt. Durch reguläre Polygone begrenzt. Die Winkelsumme an einer Ecke muss kleiner als 2 p (360°) sein. Platon Die fünf regulären Polyeder: Tetraeder (4 Dreiecke, Eckwinkel 3 60°), Würfel (6 Quadrate, Eckwinkel 3 90°), Oktaeder (8 Dreiecke, Eckwinkel 4 60°), Dodekaeder (12 Pentagone, Eckwinkel 3 108°) und Ikosaeder (20 Dreiecke, Eckwinkel 5 60°).

9. 5 Orthonormalbasis linear unabhängig für alle a, b, g gilt a. U + b. V + g. W = 0 a=b=g=0 U, V, W normiert und orthogonal { U, V, W } Orthonormalbasis (ONB) kanonische Basis { X 0, Y 0, Z 0 } Satz Es gibt unendlich viele Orthonormalbasen des 3. U 0 = , V 0 = , W 0 =


- Slides: 31