74 419 Artificial Intelligence 200506 Hierarchical Planning and


, from concrete")

 effect of move(A, B,")
 of concrete plan. n Substitute constants with variables: n")



 Take-Plane Take-Bus Take-Car Goto (bus, source)")









- Slides: 22
74. 419 Artificial Intelligence 2005/06 Hierarchical Planning and Other Stuff Russell and Norvig, Chapter 11
STRIPS – Plan Schemata § Concrete plans can also be seen as instantiations of Plan Schemata. § Shakey was able to generalize generated concrete plans into such plan schemata. ( plan generalization, learning)
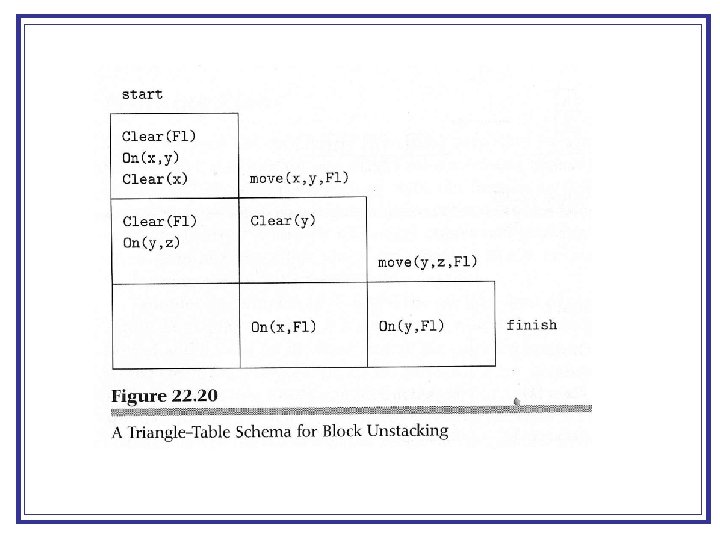
Plan Learning / Plan Abstraction Shakey generated plan schemata, so-called MACROPs (Macro-Operators), from concrete plans it had constructed earlier (i. e. “it learns plans”). The learning process is based on describing the plan in a triangle-table (preconditions and effects of sequential actions in rows, actions in columns). Then substitute constants with variables, in a kind of inverse variable binding process with unification. (substitute the same constant with one variable) Thus, an abstract plan schema is generated from the concrete plan.
Triangle Table Generate Plan with STRIPS n Set up Triangle Table: n n left of action: precondition below action: effects (add-list) - record only literals needed by subsequent actions or as part of the goal clause. Generalization (abstraction) n Substitute constants with variables.
"effect" of start-action initial state precond. of move(A, B, Fl) effect of move(A, B, Fl) precond. of move(B, C, Fl) effect of move(B, C, Fl) precond. of finish
Generate Plan Schema Generalization (abstraction) of concrete plan. n Substitute constants with variables: n n n Fl remains Fl A x B y C z
Abstract Planning ABSTRIPS Consider different criticality values of preconditions in planning. Start with global, abstract plan. Then refine plan by trying to fulfill preconditions of abstract plan: • Choose preconditions with highest criticality values first ( = most difficult to achieve). • Then lower criticality value and continue with planning.
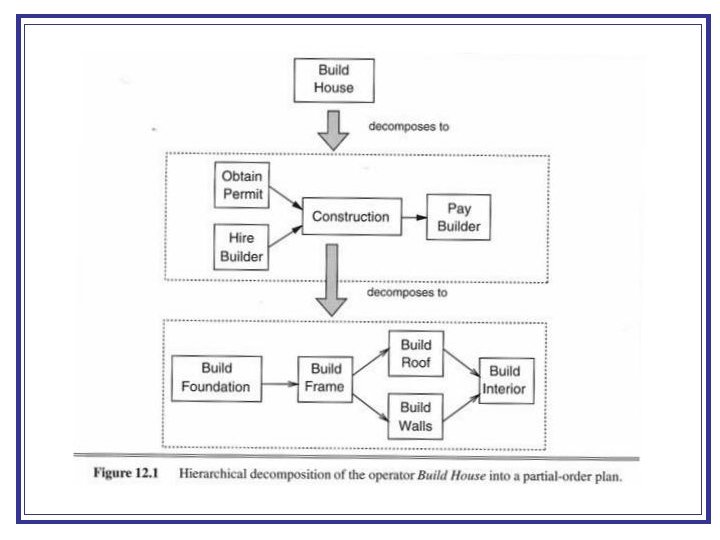
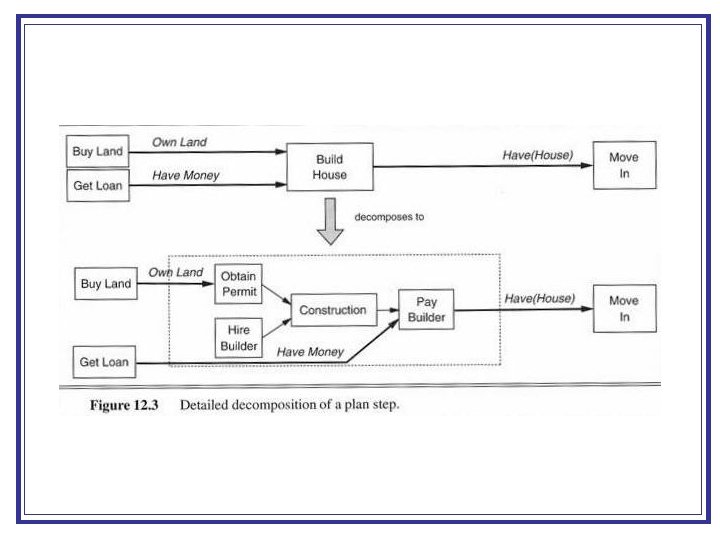
Hierarchical Planning Principle § hierarchical organization of 'actions' § complex and less complex (or: abstract) actions § lowest level reflects directly executable actions Procedure § planning starts with complex action on top § plan constructed through action decomposition § substitute complex action with plan of less complex actions (pre-defined plan schemata; or learning of plans/plan abstraction) § overall plan must generate effect of complex action
Hierarchical Planning / Plan Decomposition Plans are organized in a hierarchy. Links between nodes at different levels in the hierarchy denote a decomposition of a “complex action” into more primitive actions (operator expansion). Example: move (x, y, z) operator expansion pickup (x, y) putdown (x, z) The lowest level corresponds to executable actions of the agent.
Hierarchical Plan - Example Travel (source, dest. ) Take-Plane Take-Bus Take-Car Goto (bus, source) Buy-Ticket (bus) Hop-on (bus) Leave (bus, dest. ) Goto (counter) Request (ticket) Pay (ticket)
Extensions and Modifications to Basic Planning Methods
ADL - Action Definition Language ADL Can be seen as extension of the STRIPS language. Contains typing of parameters (sorts). Allows explicit expression of negation. Allows equality of terms in precondition formula. Example: Fly (p: plane; from: airport; to: airport; c: cargo) precondition: at(p, to) at(c, to) in(c, p) to from effect: at(p, to) at(c, to) at(p, from) at(c, from)
From Russell & Norvig, Chapter 11
Resource Constraints in Planning n Resources n physical quantities, e. g. money, fluids etc. n time n Integrate Measures into Action Description and Planning n representation of physical quantities and reasoning / calculation, n e. g. for buy-action: effect: cash : = cash – price (x) n time system / time logic, n e. g. go-to-action: effect: time : = time + 30 (Minutes) n Backtracking on Constraint Violation
Other Issues in Planning Disjunctive Preconditions n planning with alternatives Disjunctive Effects n parallel future worlds to consider All-Quantified Variables (in preconditions and effects) n only for finite, static Universe of objects Conditional Planning n action depends on conditions n specified concretely only at plan execution time n typically based on percepts/sensor information n integrate into partial order planning with threats
Real World Agents 1 n Consider Sensors and Effectors n n n perception of environment, e. g. vision ensure correspondence between internal map of robot and environment, e. g. locating robot low-level body control, e. g. Motion Control (behaviour routines, e. g. Fuzzy or Neural Network Controller) other sensor information for body control and environment mapping, e. g. bumpers, radar sensors for other information channels and cognitive processes, e. g. speech – language
Real World Agents 2 n Low-level Processing and Control n n Motion Control Audio Recording and low-level analysis Medium-level Processing n Navigation / Route Planning n Robot Location Higher-level Processing n n n Speech Recognition, NLP, . . . Strategies, Planning BDI (Belief-Desire-Intention) - Architecture
Real World Agents 3 Multi-Agents § Language / Communication § communicating agents § Mental Models of other Agents § cooperating agents § Strategies § cooperating agents § Deontic Systems § Trust
Additional References Nils J. Nilsson: Artificial Intelligence – A New Synthesis. Morgan Kaufmann, San Francisco, 1998. Konolidge, K. and K. Myers: The Saphira Architecture for Autonomous Mobile Robots (Robot Soccer Class Project) Guzzoni, D. et al. : Many Robots Make Short Work. (AAAI’ 96 Robot Competition - Meeting Scheduling) Martina Veloso, MIT (Robo. Cup)