5 2 State Estimator 1 State estimation and



 can be got")



- Slides: 8
§ 5 -2 State Estimator 1. State estimation and definition of Kx observer
Question. Can we construct a state observer? In fact, if the system is observable, it is possible to construct an observer by using input and output signals.
State observer The classical observer is constructed by the design of a model system that has the same dynamical equation with the original system. The states of the model system are used to replace the unknown states of the original system. u C B A Original system
Define then If the system is observable, the initial value x(0) can be got by using the input and output signals. Then we can set the initial value of the observer to be the same as the original system. However, the scheme has the following disadvantages: 1) A and B of the model system are absolutely the same those of the original system, but it is difficult to satisfy 2) The initial values should be determined before it runs. If the initial values of such two systems are different, the error will diverge.
In the scheme above, since the output signal is not used, we call it Open-loop Estimate. Such a scheme can not satisfy the requirement of stabilization and robustness. Remark:If the system is observable, we can determine x(0) on [0, t 1] by the input and output signals. Then it is possible to compute x(t 2) and let then ‹#› 5
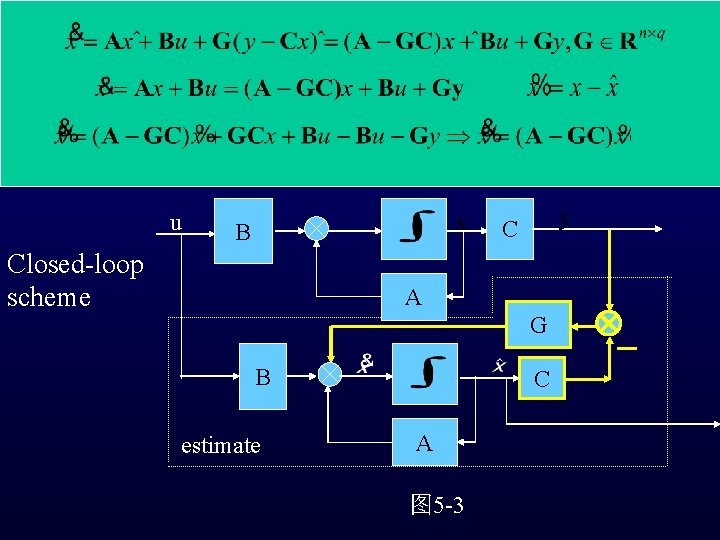
In Figure 5 -3, the system in the dotted line frame is called state observer or state estimate. The state observer is a dynamic system with u and y in the original system as input, and the output of the observer is the estimate of the original system and satisfies From Figure 5 -3, the state equation of the observer is
v u y Observer K ‹#› 8