2 class Sample public KDriver SAFEDESTRUCTORS public WDM


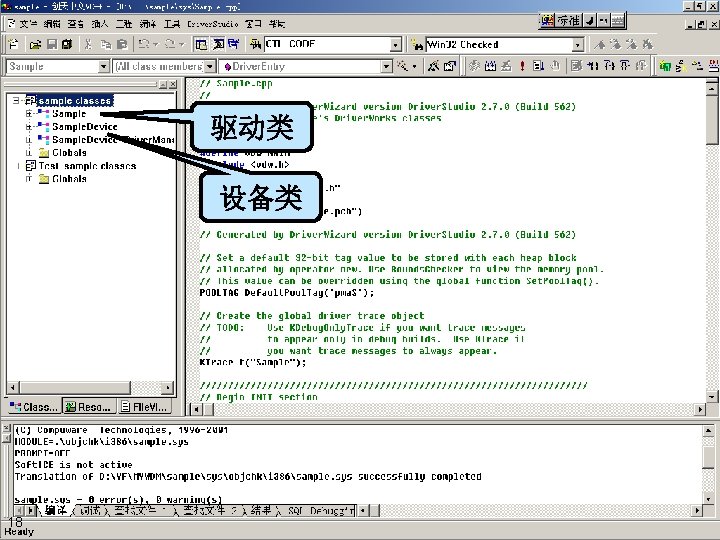
 该驱动程序框架包含了几个最基本的类,这些类是: class Sample : public KDriver // 驱动程序类,用于初始化驱动程序 { SAFE_DESTRUCTORS public: //")
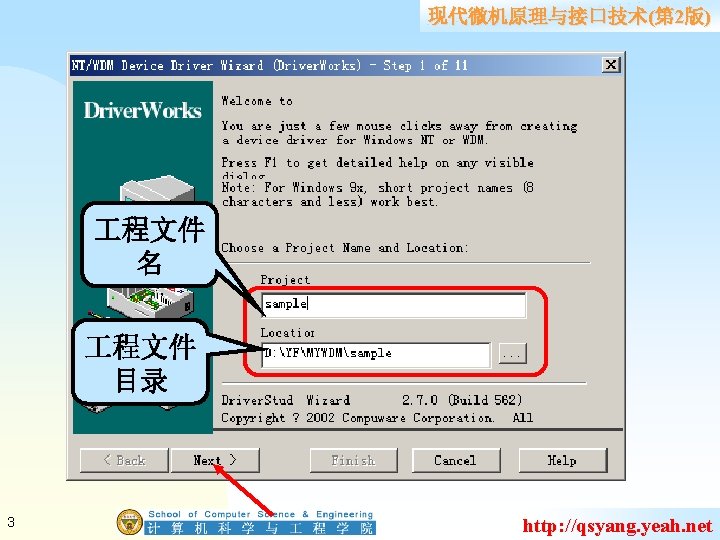
现代微机原理与接口技术(第 2版) 该驱动程序框架包含了几个最基本的类,这些类是: class Sample : public KDriver // 驱动程序类,用于初始化驱动程序 { SAFE_DESTRUCTORS public: // 以下成员函数注意和WDM中有关例程联系起来看 virtual NTSTATUS Driver. Entry(PUNICODE_STRING Registry. Path); virtual NTSTATUS Add. Device(PDEVICE_OBJECT Pdo); void Load. Registry. Parameters(KRegistry. Key &Params); int m_Unit; // The following data members are loaded from the registry during Driver. Entry ULONG m_b. Break. On. Entry; }; 21 http: //qsyang. yeah. net
 class Sample. Device : public KPnp. Device // 是设备类 KDvice的派生类,用于在 WDM环境下支持即插即用设备")
现代微机原理与接口技术 (第 2版) class Sample. Device : public KPnp. Device // 是设备类 KDvice的派生类,用于在 WDM环境下支持即插即用设备 { // Constructors public: SAFE_DESTRUCTORS; Sample. Device(PDEVICE_OBJECT Pdo, ULONG Unit); ~Sample. Device(); // Member Functions 注意和PNP的次功能代码联系起来看 public: DEVMEMBER_DISPATCHERS virtual NTSTATUS On. Start. Device(KIrp I); virtual NTSTATUS On. Stop. Device(KIrp I); virtual NTSTATUS On. Remove. Device(KIrp I); virtual NTSTATUS Default. Pnp(KIrp I); virtual NTSTATUS Default. Power(KIrp I); virtual NTSTATUS On. Device. Power. Up(KIrp I); virtual NTSTATUS On. Device. Sleep(KIrp I); void Serial. Read(KIrp I); void Serial. Write(KIrp I); 22 http: //qsyang. yeah. net
 NTSTATUS SAMPLE_IOCTL_Read_Handler(KIrp I); NTSTATUS SAMPLE_IOCTL_Write_Handler(KIrp I); NTSTATUS SAMPLE_IOCTL_Read. Write_Handler(KIrp I); #ifdef")
现代微机原理与接口技术 (第 2版) NTSTATUS SAMPLE_IOCTL_Read_Handler(KIrp I); NTSTATUS SAMPLE_IOCTL_Write_Handler(KIrp I); NTSTATUS SAMPLE_IOCTL_Read. Write_Handler(KIrp I); #ifdef _COMMENT_ONLY virtual NTSTATUS Create(KIrp I); virtual NTSTATUS Close(KIrp I); virtual NTSTATUS Device. Control(KIrp I); virtual NTSTATUS System. Control(KIrp I); virtual NTSTATUS Read(KIrp I); virtual NTSTATUS Write(KIrp I); #endif // Member Data protected: // Unit number for this device (0 -9) ULONG m_Unit; KPnp. Lower. Device m_Lower; Sample. Device_Driver. Managed. Queue m_Driver. Managed. Queue; // TODO: Create additional driver managed queues. These might be // of the same class (Sample. Device_Driver. Managed. Queue), // or you might choose to derive another class. }; 23 http: //qsyang. yeah. net
 a. 使用Read和Write方式分别读写 b. Sample. Device. cpp c. d. e. f. g. void")
现代微机原理与接口技术(第 2版) a. 使用Read和Write方式分别读写 b. Sample. Device. cpp c. d. e. f. g. void Sample. Device: : Serial. Read(KIrp I) { t << "Entering Sample. Device: : Serial. Read, " << I << EOL; NTSTATUS status = STATUS_SUCCESS; PUCHAR p. Buffer = (PUCHAR) I. Buffered. Read. Dest(); //取得 返回数据BUFF的指针 h. ULONG dw. Total. Size = I. Read. Size(CURRENT); // Requested read size i. char buff[512]; j. int n =512, j = (n % 26); k. for (int i=0; i<n; i++, j=(j + 1)%26) l. { buff[i] = 'a' + j; } m. buff[dw. Total. Size]=‘�’; //指定串尾 n. strcpy((char *)p. Buffer, buff); o. // 把给应用程序的数据拷贝给返回BUFF p. t << “The string you will read is ”“ << buff << ”“” << EOL; // 输出调试信息 q. ULONG dw. Bytes. Read = strlen(buff); // Count of bytes read r. I. Information() = dw. Bytes. Read; // 返回给应用程序的信息的字节个数 s. I. Status() = status; t. m_Driver. Managed. Queue. Pnp. Next. Irp(I); u. } 38 http: //qsyang. yeah. net
 现代微机原理与接口技术(第 2版) { t << \"Entering Sample.")
void Sample. Device: : Serial. Write(KIrp I) 现代微机原理与接口技术(第 2版) { t << "Entering Sample. Device: : Serial. Write, " << I << EOL; NTSTATUS status = STATUS_SUCCESS; PUCHAR p. Buffer = (PUCHAR)I. Buffered. Write. Source(); //取得 存放应用程序写给驱动程序的数据的BUFF的指针 ULONG dw. Total. Size = I. Write. Size(CURRENT); // 获得应用程 序写给驱动程序的信息的字节数。 ULONG dw. Bytes. Sent = dw. Total. Size; char buff[512]; strcpy(buff, (char *)p. Buffer); // 应用程序写给驱动程序的数据在 I. Buffered. Write. Source()返回的指针中。 buff[dw. Bytes. Sent] = '�'; t << "Write to driver is "" << buff << """ << EOL; I. Information() = dw. Bytes. Sent; // 返回用户实际写的字节数 I. Status() = status; m_Driver. Managed. Queue. Pnp. Next. Irp(I); }39 http: //qsyang. yeah. net
 void do. Read(int n) // 从驱动程序中读数据 { char *buf; ULONG")
Test_Sample. cpp 现代微机原理与接口技术(第 2版) void do. Read(int n) // 从驱动程序中读数据 { char *buf; ULONG n. Read; int i, j; buf = (char *) malloc(n); if (buf == NULL) { printf("Failed to allocate buffer for read"); Exit(1); } // Read data from driver printf("Reading from device - "); Read. File(h. Device, buf, n, &n. Read, NULL); // 参数分别是设备句柄、输入缓冲地址、缓冲大小(字 节数)、实际读的数据字节数、覆盖结构指针。 40 http: //qsyang. yeah. net
 printf(\"%d bytes read from device (%d requested). n\", n. Read); // Print")
现代微机原理与接口技术(第 2版) printf("%d bytes read from device (%d requested). n", n. Read); // Print what was read while(i < n. Read) n. Read { 这几句删除 // j = min((i+26), n); // for(; i < j; i++) // { // printf("%c, ", buf[i]); // } // printf("n"); printf("%c, ", buf[i++]); } printf("n"); free(buf); } 41 http: //qsyang. yeah. net
 void do. Write(int n) // 向驱动程序中写数据 { char *buf; ULONG n. Written;")
现代微机原理与接口技术(第 2版) void do. Write(int n) // 向驱动程序中写数据 { char *buf; ULONG n. Written; int i, j; buf = (char *) malloc(n); if (buf == NULL) { printf("Failed to allocate buffer for write"); Exit(1); } // start with the mod 26 letter of the number of bytes to write j = (n % 26); // load buffer with dummy data (abcdefg. . . ) for (i=0; i<n; i++, j=(j + 1)%26) { buf[i] = 'a' + j; } 42 http: //qsyang. yeah. net
 // Write data to driver printf(\"Writing to device - \"); Write. File(h.")
现代微机原理与接口技术(第 2版) // Write data to driver printf("Writing to device - "); Write. File(h. Device, buf, n, &n. Written, NULL); // 写数据, 参数的含义是驱动程序句柄、写缓冲大小、 实际驱动程序得到的信息的字节数、覆盖结构指针。 printf("%d bytes written to device (%d attempted). n", n. Written, n); i = 0; // Print what was written while(i < n) { j = min((i+26), n); for(; i < j; i++) { printf("%c, ", buf[i]); } printf("n"); } free(buf); }43 http: //qsyang. yeah. net
 NTSTATUS Sample. Device: : SAMPLE_IOCTL_Read_Handler(KIrp I) {")
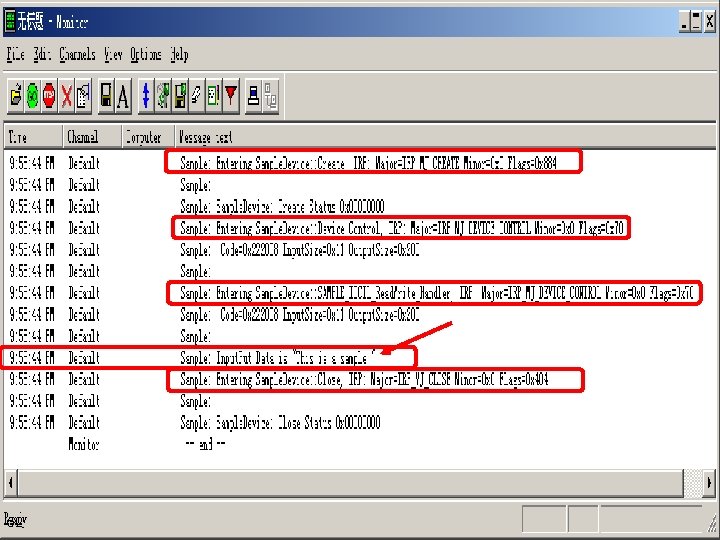
b. 使用IO控制代码方式分别读写 Sample. Device. cpp 现代微机原理与接口技术(第 2版) NTSTATUS Sample. Device: : SAMPLE_IOCTL_Read_Handler(KIrp I) { // 对应用程序读驱动程序的请求作响应 NTSTATUS status = STATUS_SUCCESS; t << "Entering Sample. Device: : SAMPLE_IOCTL_Read_Handler, " << I << EOL; char buff 1[512]; ULONG fw. Length=0; strcpy(buff 1, "Welcome to driver!"); fw. Length = strlen(buff 1)+1; if (I. Ioctl. Output. Buffer. Size() >= fw. Length) {// 如果读入缓冲够长 strcpy((PCHAR)I. Ioctl. Buffer(), buff 1); // 将信息拷给应用程序读入缓冲 I. Information() = fw. Length; // 返回信息长度 } else { I. Information() = 0; // 否则信息长度为 0 t << "buff size too small" << EOL; } return status; }44 http: //qsyang. yeah. net
 NTSTATUS Sample. Device: : SAMPLE_IOCTL_Write_Handler(KIrp I) { // 接受从应用程序中来的信息 NTSTATUS status =")
现代微机原理与接口技术(第 2版) NTSTATUS Sample. Device: : SAMPLE_IOCTL_Write_Handler(KIrp I) { // 接受从应用程序中来的信息 NTSTATUS status = STATUS_SUCCESS; t << "Entering Sample. Device : : SAMPLE_IOCTL_Write_Handler , " << I << EOL; char buff[512]; ULONG fw. Length=0; strcpy(buff, (PCHAR)I. Ioctl. Buffer()); // 拷贝从应用程序得到的 命令串到驱动程序局部数据区 t << “Input. Put Data is ”“ << buff << ”“” <<EOL; // 显示从应 用程序得到的命令串。 I. Information() = 0; return status; } 45 http: //qsyang. yeah. net
![Test_Sample. cpp 现代微机原理与接口技术(第 2版) void Test_SAMPLE_IOCTL_Read(void) { CHAR buf. Input[IOCTL_INBUF_SIZE]; // Input to device](http://slidetodoc.com/presentation_image_h2/564c221489f15f70d1896c23fa359b95/image-46.jpg "Test_Sample. cpp 现代微机原理与接口技术(第 2版) void Test_SAMPLE_IOCTL_Read(void) { CHAR buf. Input[IOCTL_INBUF_SIZE]; // Input to device")
Test_Sample. cpp 现代微机原理与接口技术(第 2版) void Test_SAMPLE_IOCTL_Read(void) { CHAR buf. Input[IOCTL_INBUF_SIZE]; // Input to device CHAR buf. Output[IOCTL_OUTBUF_SIZE]; // Output from device ULONG n. Output; // Count written to buf. Output // Call device IO Control interface (SAMPLE_IOCTL_Read) in driver printf("Issuing Ioctl to device - "); strcpy(buf. Input, "This is a sample. "); if (!Device. Io. Control(h. Device, SAMPLE_IOCTL_Read, NULL, 0, buf. Output, IOCTL_OUTBUF_SIZE, &n. Output, NULL)) { printf("ERROR: Device. Io. Control returns %0 x. ", Get. Last. Error()); Exit(1); } else printf("Return from driver is "%s"(%d)", buf. Output, n. Output); } 46 http: //qsyang. yeah. net
![现代微机原理与接口技术(第 2版) void Test_SAMPLE_IOCTL_Write(void) { CHAR buf. Input[IOCTL_INBUF_SIZE]; // Input to device CHAR buf.](http://slidetodoc.com/presentation_image_h2/564c221489f15f70d1896c23fa359b95/image-47.jpg "现代微机原理与接口技术(第 2版) void Test_SAMPLE_IOCTL_Write(void) { CHAR buf. Input[IOCTL_INBUF_SIZE]; // Input to device CHAR buf.")
现代微机原理与接口技术(第 2版) void Test_SAMPLE_IOCTL_Write(void) { CHAR buf. Input[IOCTL_INBUF_SIZE]; // Input to device CHAR buf. Output[IOCTL_OUTBUF_SIZE]; // Output from device ULONG n. Output; // Count written to buf. Output // Call device IO Control interface (SAMPLE_IOCTL_Write) in driver printf("Issuing Ioctl to device - "); strcpy(buf. Input, "Now let us write this string. "); if (!Device. Io. Control(h. Device, SAMPLE_IOCTL_Write, buf. Input, strlen(buf. Input), NULL, 0, &n. Output, NULL)) // 该函数参数分 别是设备句柄、IO控制命令、写缓冲大小、读缓冲大小、实际 读的字节数、覆盖结构指针(注意,这里的buf. Input是指Input到设备,所以对应 用软件这是写缓冲, buf. Output是从设备output到应用程序,是读缓冲。 { printf("ERROR: Device. Io. Control returns %0 x. ", Get. Last. Error()); Exit(1); } } 47 http: //qsyang. yeah. net
 Sample. Device. cpp NTSTATUS Sample. Device: : SAMPLE_IOCTL_Read. Write_Handler(KIrp I)")
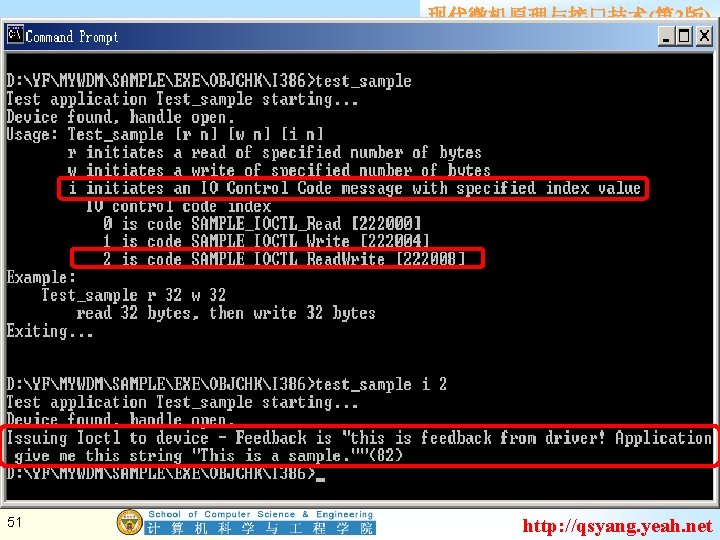
c. 使用IO控制代码方式写并且读 现代微机原理与接口技术(第 2版) Sample. Device. cpp NTSTATUS Sample. Device: : SAMPLE_IOCTL_Read. Write_Handler(KIrp I) { NTSTATUS status = STATUS_SUCCESS; t << "Entering Sample. Device: : SAMPLE_IOCTL_Read. Write_Handler, " << I << EOL; char buff[512], buff 1[512]; ULONG fw. Length=0; strcpy(buff, (PCHAR)I. Ioctl. Buffer()); // 拷贝应用程序来的信息 t << "Input. Put Data is "" << buff << """ <<EOL; strcpy(buff 1, "this is feedback from driver! Application give me this string ""); strcat(buff 1, buff); strcat(buff 1, “”“); // 以上是组织反馈的信息 48 http: //qsyang. yeah. net
 fw. Length = strlen(buff 1)+1; if (I. Ioctl. Output. Buffer. Size() >=")
现代微机原理与接口技术(第 2版) fw. Length = strlen(buff 1)+1; if (I. Ioctl. Output. Buffer. Size() >= fw. Length) { strcpy((PCHAR)I. Ioctl. Buffer(), buff 1); // 拷贝反馈信息 I. Information() = fw. Length; // 设置反馈信息字节数 } else { I. Information() = 0; t << "buff size too small" << EOL; } return status; } 49 http: //qsyang. yeah. net
 void Test_SAMPLE_IOCTL_Read. Write(void) { buf. Output is written by the")
Test_Sample. cpp 现代微机原理与接口技术(第 2版) void Test_SAMPLE_IOCTL_Read. Write(void) { buf. Output is written by the device to return data to this application CHAR buf. Input[IOCTL_INBUF_SIZE]; // Input to device CHAR buf. Output[IOCTL_OUTBUF_SIZE]; // Output from device ULONG n. Output; // Count written to buf. Output // Call device IO Control interface (SAMPLE_IOCTL_Read. Write) in driver printf("Issuing Ioctl to device - "); strcpy(buf. Input, "This is a sample. "); if (!Device. Io. Control(h. Device, SAMPLE_IOCTL_Read. Write, buf. Input, strlen(buf. Input), buf. Output, IOCTL_OUTBUF_SIZE, &n. Output, NULL) ) { printf("ERROR: Device. Io. Control returns %0 x. ", Get. Last. Error()); Exit(1); } else printf("Feedback is "%s"(%d)", buf. Output, n. Output); } 50 http: //qsyang. yeah. net
 KIo. Range: : KIo. Range(只介绍WDM形式) FORM 3 (WDM): KIo. Range( ULONG Cpu.")
现代微机原理与接口技术(第 2版) KIo. Range: : KIo. Range(只介绍WDM形式) FORM 3 (WDM): KIo. Range( ULONG Cpu. Physical. Address, //转换成外围设备地址的CPU总线上的物理地址 BOOLEAN In. Cpu. Io. Space, //如果IO范围是在CPU总线的IO空间中为TRUE,否则为FALSE ULONG Count, //以字节计的区域的大小 BOOLEAN Map. To. System. Virtual =TRUE//指定是否需要构造函数创建一个非页系统 空间的地址空间映射,如果驱动程序读写设备中的数据,就需要这种映射 ); FORM 4 (WDM): (注意: 这种形式不被 Driver. Studio 2. 0支持。) 支持。 KIo. Range( PCM_RESOURCE_LIST p. Translated. Resource. List, //指向转换资源表的指针 ULONG Ordinal=0, //指定p. Translated. Resource. List指向的资源列表中的一个特殊端口资源 BOOLEAN Map. To. System. Virtual =TRUE ); FORM 5 (WDM): KIo. Range( PCM_RESOURCE_LIST p. Translated. Resource. List, //可通过KIrp: : Translated. Resources获得 PCM_RESOURCE_LIST p. Raw. Resource. List, //指向原始资源表的指针 ULONG Ordinal=0, BOOLEAN Map. To. System. Virtual =TRUE ); 构造 KIo. Range类。 54 http: //qsyang. yeah. net
 KIo. Range: : Initialize (只介绍WDM形式) FORM 2 (WDM): NTSTATUS Initialize( ULONG Cpu.")
现代微机原理与接口技术(第 2版) KIo. Range: : Initialize (只介绍WDM形式) FORM 2 (WDM): NTSTATUS Initialize( ULONG Cpu. Physical. Address, BOOLEAN In. Cpu. Io. Space, ULONG Count, BOOLEAN Map. To. System. Virtual=TRUE ); FORM 3 (WDM): (注意: 这种形式不被 Driver. Studio 2. 0支持。) 支持。 NTSTATUS Initialize( PCM_RESOURCE_LIST p. Translated. Resource. List, ULONG Ordinal=0, BOOLEAN Map. To. System. Virtual =TRUE ); FORM 4 (WDM): Initialize( PCM_RESOURCE_LIST p. Translated. Resource. List, PCM_RESOURCE_LIST p. Raw. Resource. List, ULONG Ordinal=0, BOOLEAN Map. To. System. Virtual =TRUE ); 初始化或重新初始化 KIo. Range的实例。 55 http: //qsyang. yeah. net
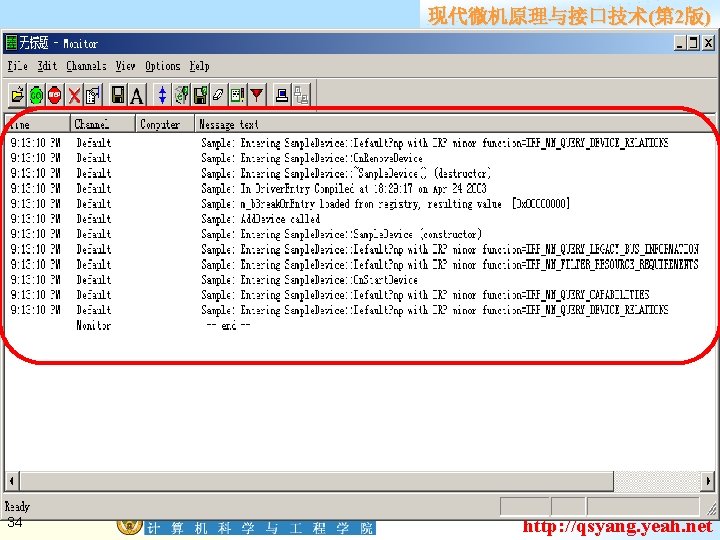
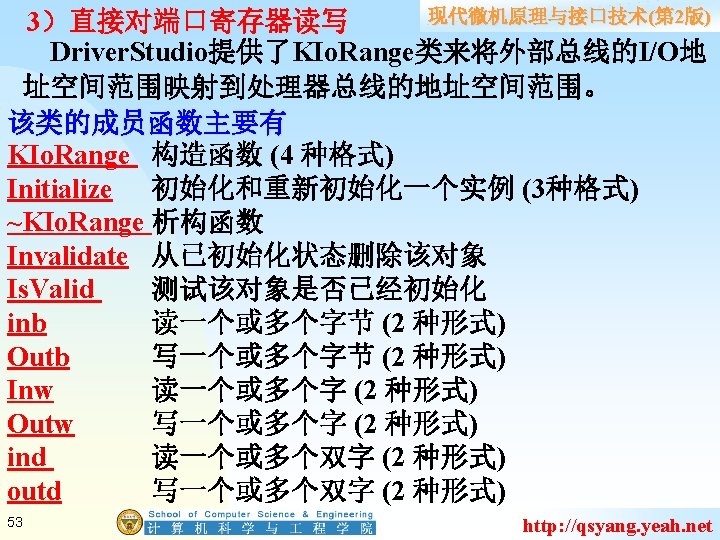
 KIo. Range: : inb FORM 1: UCHAR inb( ULONG Byte. Offset );")
现代微机原理与接口技术(第 2版) KIo. Range: : inb FORM 1: UCHAR inb( ULONG Byte. Offset ); FORM 2: VOID inb( ULONG Byte. Offset, PUCHAR Buffer, ULONG Count ); 从映射空间读一个或多个字节。 56 http: //qsyang. yeah. net
 KInterrupt: : KInterrupt(只介绍WDM形式) FORM 3: (WDM) KInterrupt( KIRQL irql, //即插即用设备提供的IRQL值 ULONG vector,")
现代微机原理与接口技术(第 2版) KInterrupt: : KInterrupt(只介绍WDM形式) FORM 3: (WDM) KInterrupt( KIRQL irql, //即插即用设备提供的IRQL值 ULONG vector, //即插即用设备提供的向量值 KINTERRUPT_MODE Mode, //Level. Sensitive 或 Latched中选一. BOOLEAN b. Share. Vector=FALSE, //该向量是否被几个设备共享 KAFFINITY affinity=1, //this is the processor affinity mask. BOOLEAN b. Save. Float =FALSE //是否需要在中断到来使保存浮点 处理器上下文,X 86平台下必须使FALSE ); 构造类Kinterrupt的实例。 60 http: //qsyang. yeah. net
 KInterrupt: : Initialize(只介绍WDM形式) FORM 2: (WDM) VOID Initialize( KIRQL irql, ULONG vector,")
现代微机原理与接口技术(第 2版) KInterrupt: : Initialize(只介绍WDM形式) FORM 2: (WDM) VOID Initialize( KIRQL irql, ULONG vector, KINTERRUPT_MODE Mode, BOOLEAN b. Share. Vector=FALSE, KAFFINITY affinity=1, BOOLEAN b. Save. Float=FALSE ); 初始化对象。只在对象没有初始化的时候使用。 61 http: //qsyang. yeah. net
 KInterrupt: : Connect FORM 1: NTSTATUS Connect( PKSERVICE_ROUTINE Isr, //作为ISR服务的函数的地址 PVOID Context")
现代微机原理与接口技术(第 2版) KInterrupt: : Connect FORM 1: NTSTATUS Connect( PKSERVICE_ROUTINE Isr, //作为ISR服务的函数的地址 PVOID Context //当系统调用ISR的时候传递给他的无类型的参数 ); FORM 2: NTSTATUS Connect( PKSERVICE_ROUTINE Isr, PVOID Context, PKSPIN_LOCK p. Spin, KIRQL Synch. Irql ); 绑定一个中断到ISR(中断处理程序)。 62 http: //qsyang. yeah. net
 KInterrupt: : Initialize. And. Connect NTSTATUS Initialize. And. Connect( PCM_RESOURCE_LIST p. Resource.")
现代微机原理与接口技术(第 2版) KInterrupt: : Initialize. And. Connect NTSTATUS Initialize. And. Connect( PCM_RESOURCE_LIST p. Resource. List, //指向资源列表的指针 PKSERVICE_ROUTINE Isr, PVOID Isr. Context, ULONG Ordinal=0, BOOLEAN b. Save. Float=FALSE ); 初始化一个中断并绑定到一个ISR上。 对于 WDM 驱动程序,p. Resource. List 必须是一个转换 资源表,例如是KIrp: : Translated. Resources的返回值。 63 http: //qsyang. yeah. net
 下面我们来举例说明。 • 首先定义类KInterrupt的一个实例 KInterrupt m_The. Interrupt; • 在设备类中声明一个成员函数The. Isr作为中断服务例程 ISR。 class Sample.")
现代微机原理与接口技术(第 2版) 下面我们来举例说明。 • 首先定义类KInterrupt的一个实例 KInterrupt m_The. Interrupt; • 在设备类中声明一个成员函数The. Isr作为中断服务例程 ISR。 class Sample. Device : public KPnp. Device { …… public: MEMBER_ISR (Sample. Device, The. Isr); …… #ifdef _COMMENT_ONLY BOOLEAN The. Isr(void){ return TRUE ; }; #endif …… }64 http: //qsyang. yeah. net
 • 在On. Start. Device例程中获取包括中断的设备资源并初 始化中断和挂接ISR Sample. Device : : On. Start. Device(KIrp")
现代微机原理与接口技术(第 2版) • 在On. Start. Device例程中获取包括中断的设备资源并初 始化中断和挂接ISR Sample. Device : : On. Start. Device(KIrp I) { …… PCM_RESOURCE_LIST p. Res. List = I. Translated. Resources(); //获取设备资源 //初始化中断并挂接中断服务例程The. Isr status = m_The. Interrupt. Initialize. And. Connect( p. Res. List, Link. To(The. Isr), this ); …… } 65 http: //qsyang. yeah. net
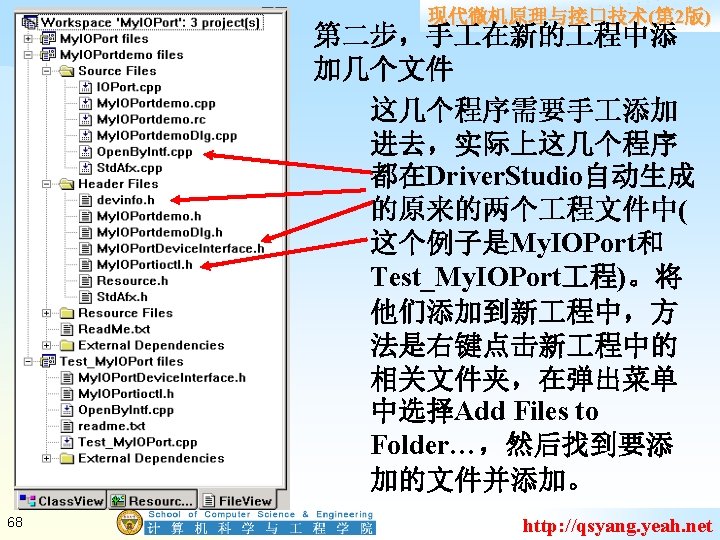
 第三步,打开Open. By. Intf. cpp文件,在开始第一行添加 #include \"stdafx. h\" 第四步, 1 2 69 3")
现代微机原理与接口技术(第 2版) 第三步,打开Open. By. Intf. cpp文件,在开始第一行添加 #include "stdafx. h" 第四步, 1 2 69 3 4 5 C: PROGRAM FILESCOMPUWARESOFTICE DRIVER SUITEDRIVERWORKSINCLUDE http: //qsyang. yeah. net
 3 4 2 setupapi. lib kernel 32. lib user 32.")
第五步, 1 现代微机原理与接口技术(第 2版) 3 4 2 setupapi. lib kernel 32. lib user 32. lib gdi 32. lib winspool. lib comdlg 32. lib advapi 32. lib shell 32. lib oleaut 32. lib uuid. lib 70 可以直接从自动生成的控制台 程的设置中拷贝这些库的名称 http: //qsyang. yeah. net
- Slides: 71