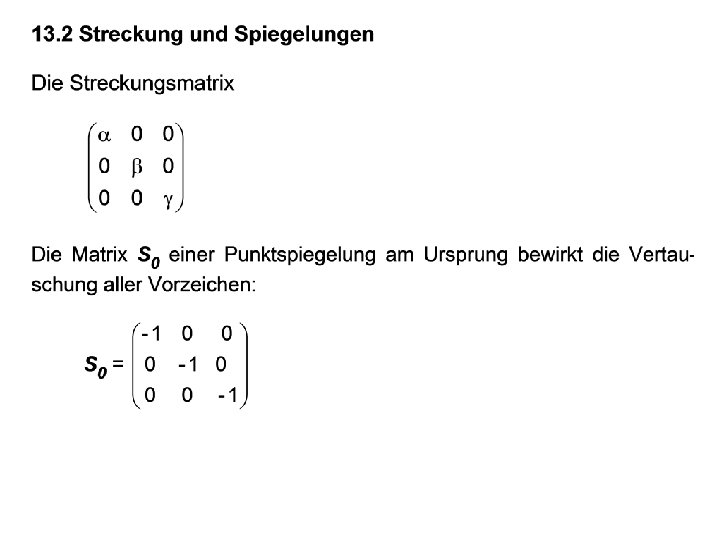
13 Transformationen mit Matrizen Manche geometrischen Probleme lassen

13. Transformationen mit Matrizen

Manche geometrischen Probleme lassen sich leichter lösen, wenn man das Koordinatensystem "geeignet" wählt, d. h. die Vektoren transformiert oder abbildet. Offensichtlich werden lineare Abbildungen durch Matrizen bewirkt. Sei A eine m n Matrix und X eine n 1 Matrix, d. h. ein Vektor mit n Komponenten, so führt die Abbildung f. A: n m Y = f. A(X) = A X auf einen Vektor Y mit m Komponenten. Die Umkehrabbildung ergibt sich mit Hilfe der inversen Matrix A-1 (falls diese existiert) A-1 Y = f. A-1(Y) = X.

Manche geometrischen Probleme lassen sich leichter lösen, wenn man das Koordinatensystem "geeignet" wählt, d. h. die Vektoren transformiert oder abbildet. Offensichtlich werden lineare Abbildungen durch Matrizen bewirkt. Sei A eine m n Matrix und X eine n 1 Matrix, d. h. ein Vektor mit n Komponenten, so führt die Abbildung f. A: n m Y = f. A(X) = A X auf einen Vektor Y mit m Komponenten. surjektiv, nicht injektiv, nicht surjektiv

13. 1 Drehungen entgegen dem Uhrzeigersinn um den Winkel j um Z 0 = W 0 (j) = { U 0, V 0, W 0 } = { X 0, Y 0, Z 0 } = (0) U 0(0) = X 0 U 0(j) =

13. 1 Drehungen entgegen dem Uhrzeigersinn um den Winkel j um Z 0 = W 0 (j) = { U 0, V 0, W 0 } = { X 0, Y 0, Z 0 } = (0) U 0(0) = X 0 U 0(j) = V 0(j) =
 festen Vektors A= sind in A(j) =")
Die Koordinaten eines im gedrehten System (j) festen Vektors A= sind in A(j) = D A(0) = =
 zu finden, benötigen wir die inverse Matrix D-1.")
Um den Übergang von nach (j) zu finden, benötigen wir die inverse Matrix D-1. D I 3

D-1 = DT Solche Matrizen heißen orthogonale Matrizen. Denselben Effekt erhält man durch Umkehrung der Drehrichtung, d. h. durch Ersetzen von j durch (-j).

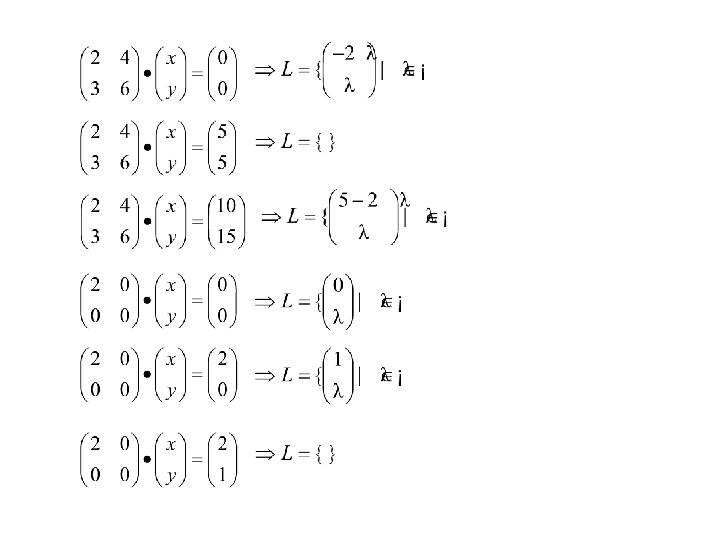
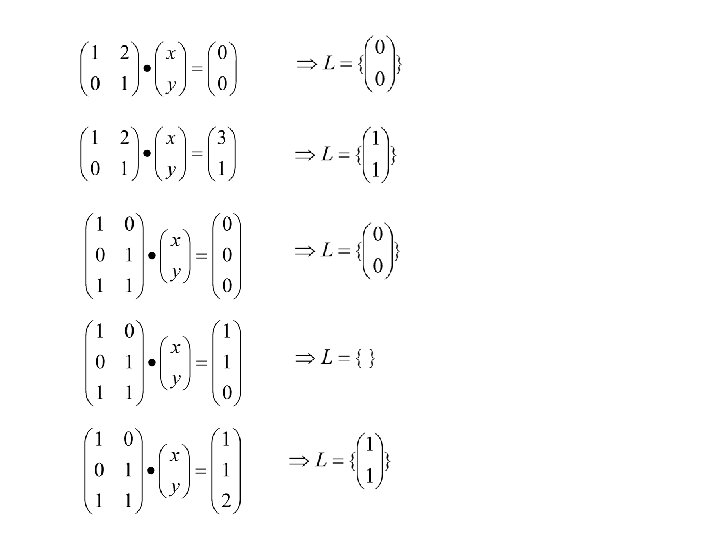
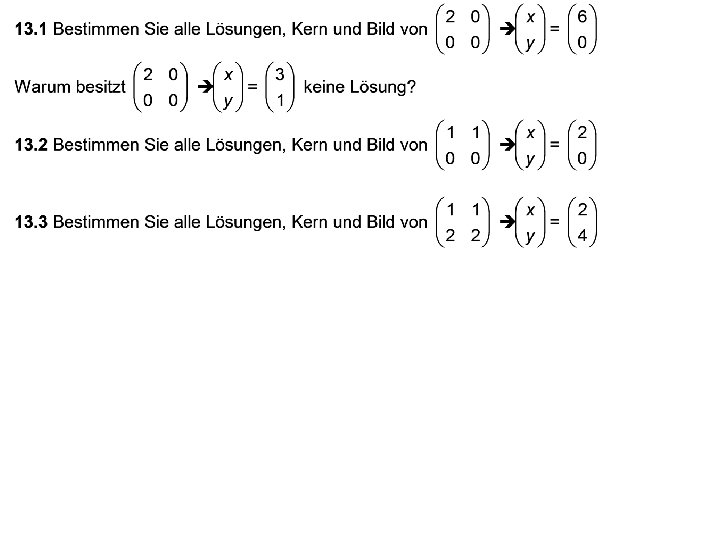
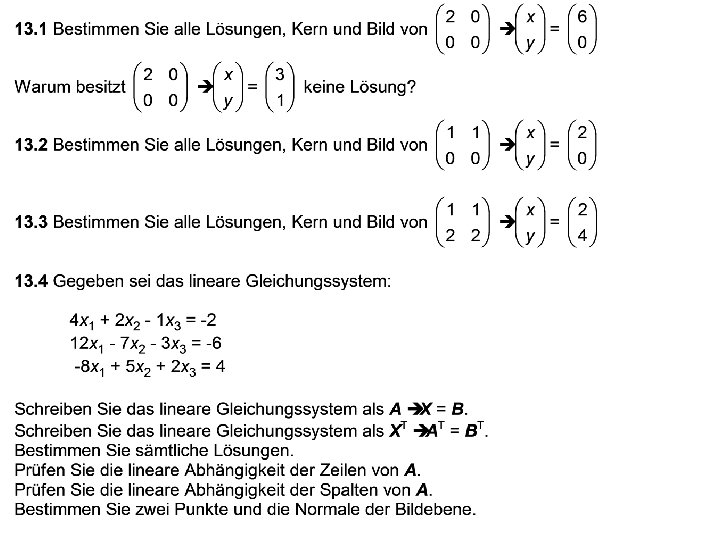
13. 4 Lösungsmengen irregulärer linearer Gleichungssysteme A X=0 A X = B mit homogen B≠ 0 inhomogen Sei A C = B Alle anderen Lösungen C' sind dann von der Gestalt C' = C + C* wobei A C* = 0 A (C + C*) = A C + A C* = B + 0 = B

Es sei C' eine beliebige und C die bekannte Lösung, dann ist A (C' - C) = A C' - A C = B = 0 - B Also ist (C' - C) = C* C' = C + C* Jedes homogene Gleichungssystem besitzt mindestens eine Lösung, nämlich die triviale Lösung C* = 0. Aber nicht jedes inhomogene Gleichungssystem besitzt eine Lösung. A X = B hat genau eine (bzw. mehrere) Lösung(en) A X = 0 hat genau eine (bzw. mehrere) Lösung(en). A X = 0 hat nur eine Lösung A X = B hat eine oder keine Lösung.

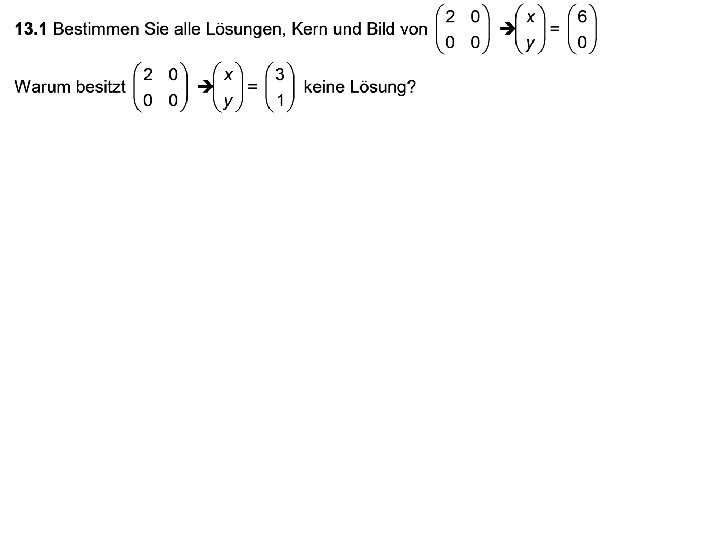
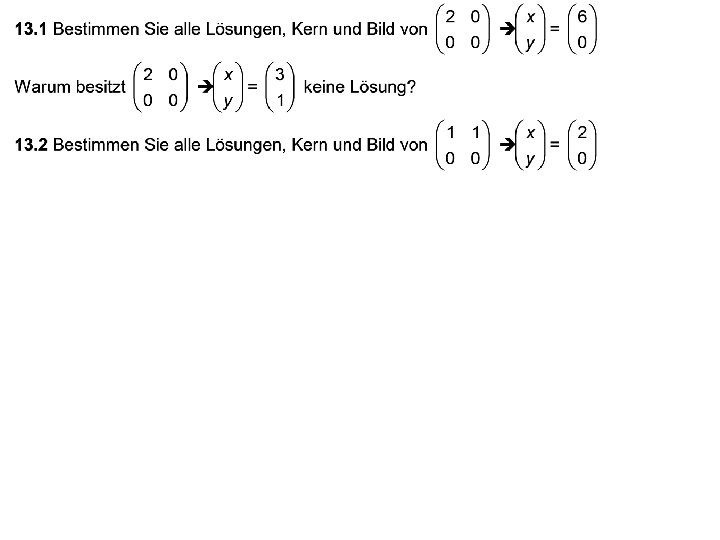
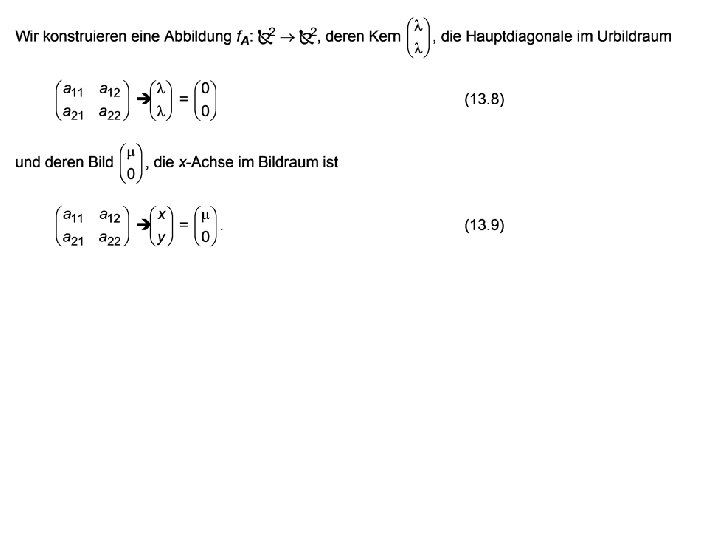
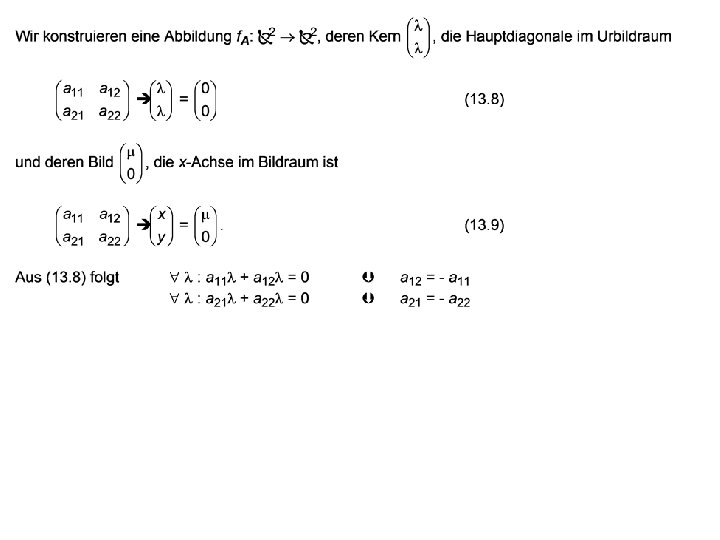
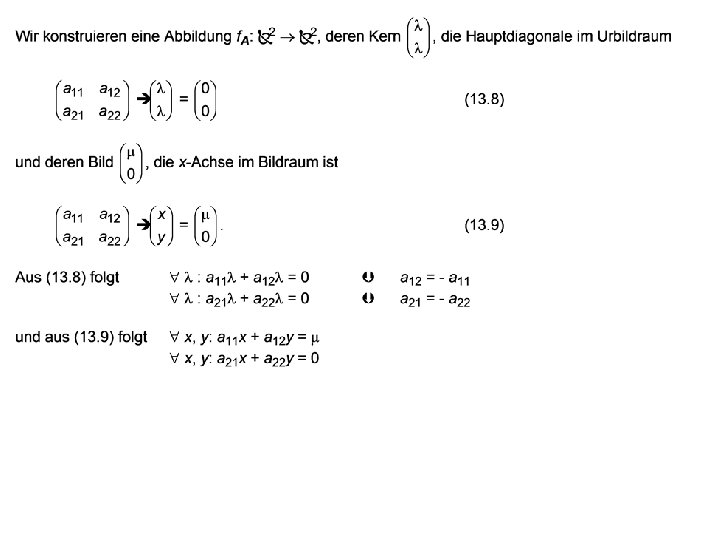
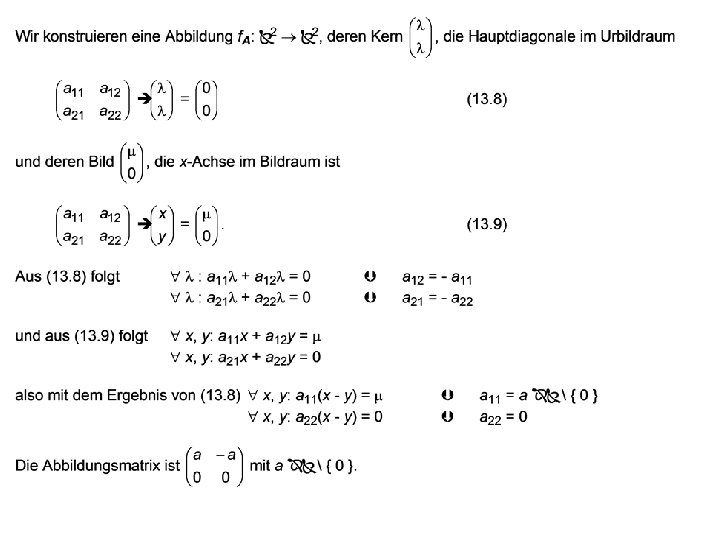
Definition. Die Menge aller Vektoren aus n, die auf den Nullvektor abgebildet werden, also die Lösungsmenge des homogenen Gleichungssystems, nennen wir Kern der Abbildung: Kern (f. A) = { X n | f. A(X) = 0 } Kern (f. A) ist ein Unterraum des Definitionsbereichs, also des ndimensionalen Vektorraums, denn Addition zweier Vektoren aus Kern (f. A) sowie Multiplikation mit einem Skalar ergibt wieder einen Vektor aus Kern (f. A). A X = 0 und A X' = 0 A (X + X') = 0 A X = 0 A l. X = l(A X) = l 0 = 0 n m

Definition. Die Menge aller Vektoren aus m, die Bilder von Vektoren X aus n sind, nennen wir Bild der Abbildung: Bild (f. A) = { B m | B = f. A(X) } Bild (f. A) ist ein Unterraum des m-dimensionalen Bildraums. Sind B und B' Bilder, d. h. A X = B und A X' = B', so ist auch B + B' ein Bild, nämlich von X + X', das mit X und X' auch zum Urbildraum gehört. A X = B und A X' = B' A (X + X') = B + B' A X = B A l. X = l(A X) = l. B n m
) heißt Defekt der Abbildung. Definition.")
Definition. Die Dimension des Kerns dim (Kern (f. A)) heißt Defekt der Abbildung. Definition. Die Dimension des Bildes dim (Bild (f. A)) heißt Rang der Abbildung.
 Die Lösungsmenge des homogenen Gleichungssystems A")
Abbildungen mit der m n Matrix A: (1) Die Lösungsmenge des homogenen Gleichungssystems A X=0 ist Kern (f. A). Das homogene Gleichungssystems besitzt nur eine Lösung Defekt (f. A) = 0. (2) Das inhomogene Gleichungssystem A X=B besitzt mindestens eine Lösung C B Bild (f. A). (3) Sei C eine solche Lösung, dann ist die gesamte Lösungsmenge von A X = B die Menge { C + Kern (f. A) }. A X = B hat dann genau eine Lösung Defekt (f. A) = 0. (4) Defekt (f. A) + Rang (f. A) = dim ( n) = n.

- Slides: 35