1 Px 4 Gazebo Nutt X Pixhawk ROSGazebo
 - Gazebo, Nutt. X (Pixhawk)대상")
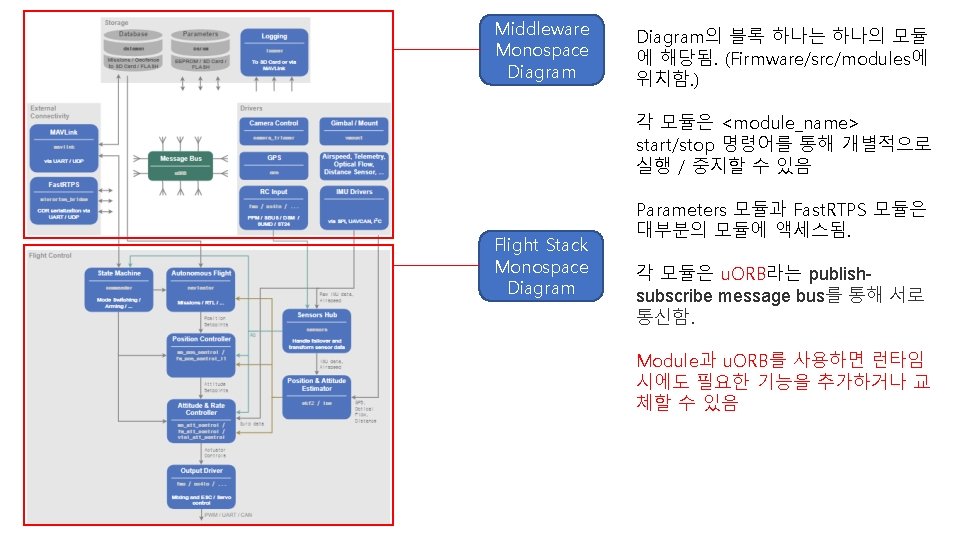
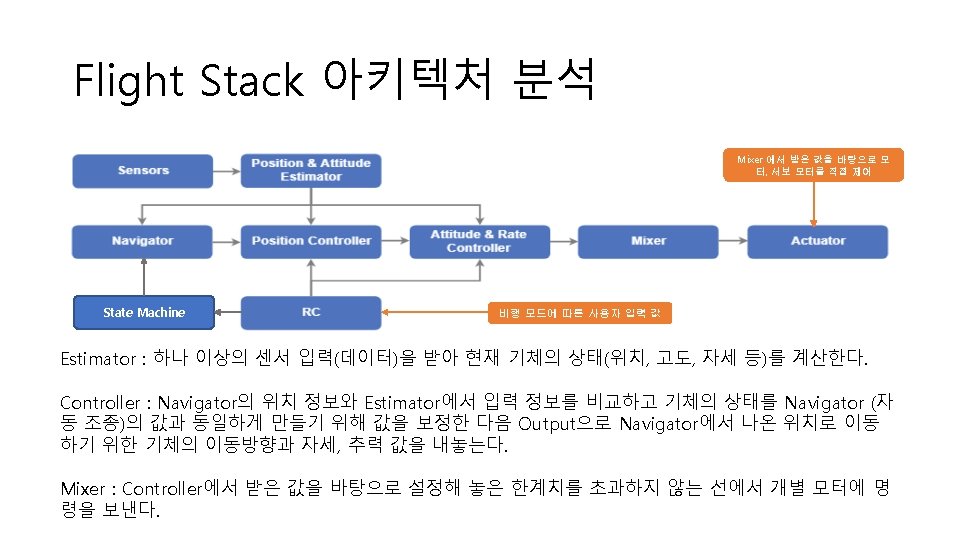
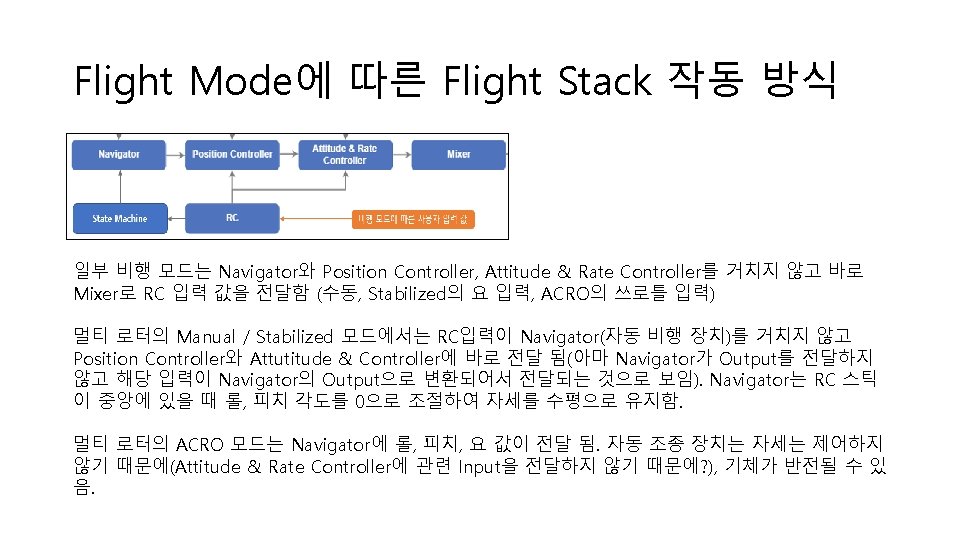
목차 • 1. Px 4 개발환경 구축 (툴체인 설치) - Gazebo, Nutt. X (Pixhawk)대상 개발환경 - ROS+Gazebo 기반 SITL 개발환경 • 2. Px 4 아키텍처 분석 - Architecture - Flight Stack - Flight Mode • 3. Px 4 Firmware 디렉토리 분석 - Firmware - src
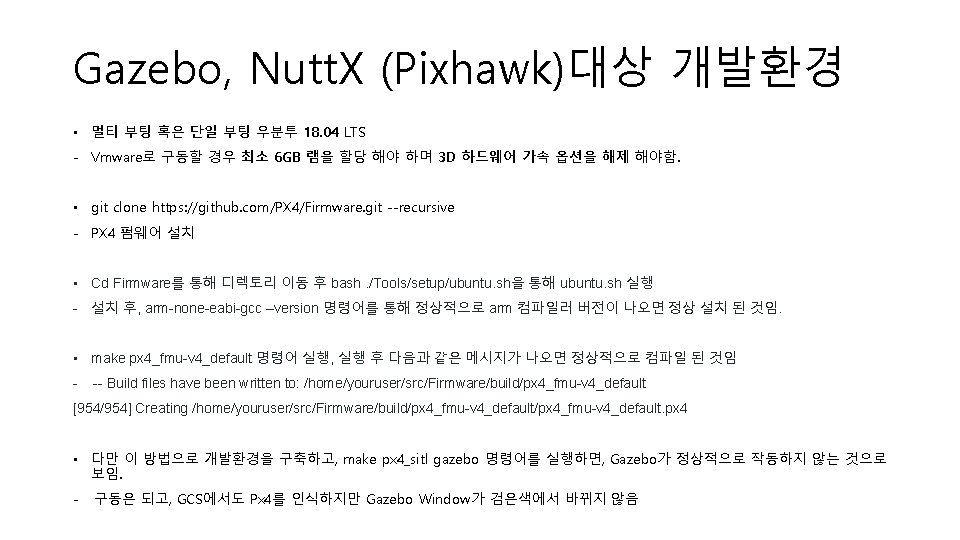

ROS+Gazebo 기반 SITL 개발환경 • 멀티 부팅 혹은 단일 부팅 우분투 18. 04 LTS - Vmware로 구동할 경우 최소 6 GB 램을 할당 해야 하며 3 D 하드웨어 가속 옵션을 해제 해야함. • wget https: //raw. githubusercontent. com/PX 4/Devguide/v 1. 9. 0/build_scripts/ubuntu_sim_ros_melodic. sh • Source ubuntu_sim_ros_melodic. sh - Ubuntu 18. 04용 ROS Melodic + Gazebo 9. 0 설치 • git clone https: //github. com/PX 4/Firmware. git --recursive - PX 4 펌웨어 설치 • GSTREAMER 패키지 설치 명령어 sudo apt install libgstreamer 1. 0 -dev sudo apt install gstreamer 1. 0 -plugins-good sudo apt install gstreamer 1. 0 -plugins-bad sudo apt install gstreamer 1. 0 -plugins-ugly - Make px 4_sitl gazebo 명령어를 칠 경우 pip을 통해 추가 프로그램을 받을 필요가 있음. (3개~4개) - 이 방법으로 할 경우 실제 하드웨어에 업로드하기 위한 목적으로 컴파일을 하는 것은 정상 작동하지 않는 것으로 보임

SITL 구동 ROS + Gazebo 9. 0 + Px 4 SITL 구동 예시
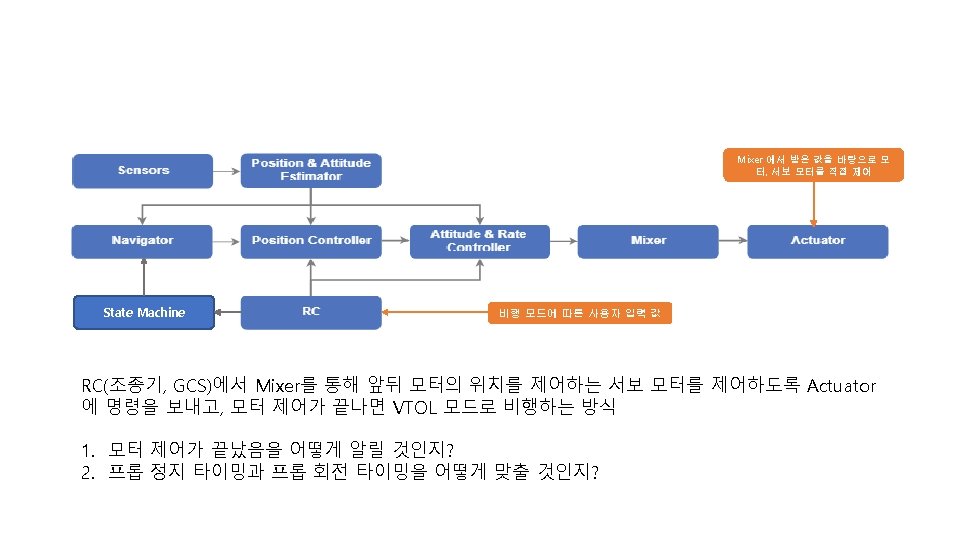

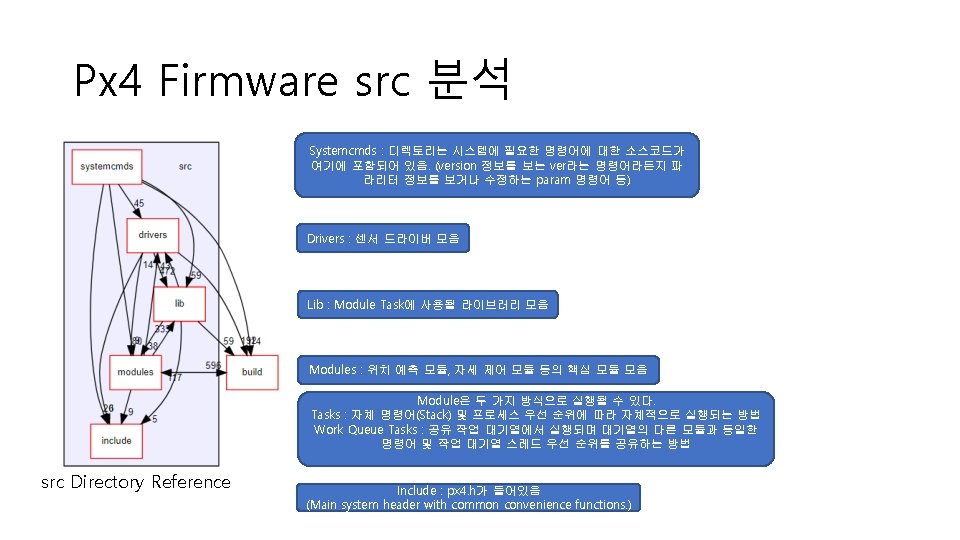
3. Px 4 Firmware 분석

Px 4 Firmware 구조 분석
- Slides: 17