1 Principiul I principiul ineriei Orice corp are

 Orice corp are tendinţa de a şi păstra starea")
 Legea acţiunii forţei acţiunea forţei a>0 1. a")
 (formula fundamentală) m F 1 acceleraţia")


 forţa de tracţiune (asupra avionului)")







 l 0 Fd Fe Fe x<0 0 Fd x>0")



 ac vl Forţele de")










 v Ff Ff= forţa (tangentă corpului) din partea")



 Forţa de înaintare (din")
 Forţa de frecare a roţii cu")






")




















,")






- Slides: 75
1. Principiul I (principiul inerţiei) Orice corp are tendinţa de a şi păstra starea de repaus relativ ( v=0) sau starea de mişcare rectilinie uniformă ( v = const. ) până nu intervin forţe a=0 Inerţia proporţională cu masa M inerţie mare m inerţie mică
2. Principiul II (fundamental al dinamicii) Legea acţiunii forţei acţiunea forţei a>0 1. a proporţional cu F 2. a invers proporţional cu m a = F * 1/ m F = m a *
2. Legea a II-a a dinamicii (cont. ) (formula fundamentală) m F 1 acceleraţia direct proporţională cu forţa m a 2 m F 1 a 1 acceleraţia invers proporţională cu masa M a 2 F 1 Acceleraţia (vectorul) imprimată corpului este direct proporţională cu forţa care acţionează asupra acestuia şi invers proporţională cu masa acestuia.
F a = m F = ma altă formă: ∆ v a = ∆t ∆ v ∆t F = m = ∆p ∆t forţa este produsul masei cu acceleraţia sau forţa este variaţia impulsului în timp
Principiul III principiul acţiunilor reciproce Fiecărei forţe de acţiune îi corespunde o forţă egală şi de sens contrar (reacţiune) F = - F a r F =F a r Obs: cele 2 forţe acţionează asupra a 2 corpuri diferite
3. Legea a III-a a dinamicii ( forţe reciproce) forţa de tracţiune (asupra avionului) forţa de reacţie (asupra gazelor de ardere) Ft = Fr
3+1 Principiul suplimentar pentru situaţia acţiunii simultane a mai multor forţe a 1 F 1 a 1= m F 2 a 2= m F 3 a 3 = m F 1 F 2 a 2 F 3 a 1 a 2 a 3 a = a +a + … R 1 2 3
sau F 1 m a. R = a R FR = F 1 F 2 F 3 1 + +… = (F 1+F 2+F 3+…) m m F 2 F 3 FR Aşadar: se determină acceleraţia rezultantă prin compunerea acceleraţiilor individuale sau se determină forţa rezultantă si acesteia i se aplica legea a II a, a dinamicii.
Tipuri de forţe
1. Forţe elastice 1. 1. Deformări elastice. Legea Hooke Poartă numele de deformare elastică acea schimbare de formă a unui corp, în urma căreia, acesta revine la forma iniţială după încetarea forţei deformatoare. l 0 S l Δl Fd lo = lungimea iniţială a probei l = lungimea finală a probei S = secţiunea probei Δl = alungirea absolută F / S = efort unitar Δl / l 0 = alungirea relativă Fd = forţa deformatoare
Factorii de care depinde deformarea: 1. Δl direct proporţional cu Fd Fd Fd Δl invers proporţional cu S (direct proporţional cu 1/S) 2. Fd Fd
3. Δl direct proporţional cu l 0 Fd Fd Δl depinde de material ( invers proporţional cu modulul Young E / o constantă de material /) 4. Fd Fd Deci: Δl = Fd*1/S*l 0*1/E
Fd Δl E S l 0 legea Hooke Pentru acelaşi corp deformabil: S l 0 E = const = k (constanta elastică) Fd = k Δl În interiorul corpului deformat, apare o forţă egală şi de sens contrar celei deformatoare care aduce corpul la forma iniţială după încetarea acţiunii deformatoarei. Se numeşte forţa elastică F = - k Δl F Fd
1. Forţe elastice (cont. ) l 0 Fd Fe Fe x<0 0 Fd x>0 Definiţie: Este forţa ce se opune deformării şi apare în interiorul corpului deformat. Direcţia : cea a axei resortului (corpului deformat). Sens : de la punctul de legătură spre suport( la întindere), spre exterior (la comprimare). Modul (valoare) : proporţională cu deformarea x = l = (l-l 0) x>0 la alungire ; x<0 la comprimare (k = const. > 0) Este o forţă de contact
Dispozitiv pentru determinarea deformărilor
2. Forţe de inerţie apar numai în sisteme neinerţiale (sisteme de referinţă care se mişcă accelerat) m Fi = - ma O a m a Fi = ma
2. 1. Forţa centrifugă de inerţie FK (centrifugă de inerţie) ac vl Forţele de inerţie au întotdeauna sens opus accelerării sistemului modulul este dat de legea fundamentală a dinamicii (Fi=ma)
3. Tensiunea în fire, bare. . . v = const a=0 T G a>0 a<0 T* T** G G Definiţie : Este o forţa ce apare intr un solid legat de o extremitate. Direcţie : cea va firului, barei. . . Sens: de la punctul de legatură spre fir. Modul (valoare) : egală cu a forţei ce se exercită asupra obiectului legat de fir. Este o forţă de contact.
3. Forţe de tensiune caracteristice firelor, cablurilor, barelor, etc. • Tensiuni= forţe care întind / comprimă firele, cablurile barele • se măsoară cu dinamometrul înserat în secţiunea acestuia daca firul este în repaus sau se mişcă rectiliniu uniform tensiunea este suma forţelor de la capete; dacă firul se mişcă accelerat, se ia în considerare şi forţa de inerţie T = F F v=0 sau v = const T = F + ma a v variabil F
Tensiuni în firele electrice, în structura metalică a podurilor. . .
Structuri tensionate
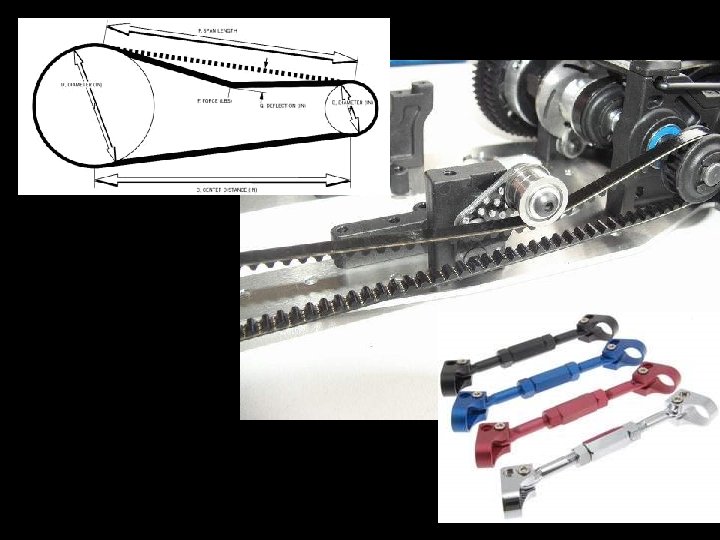
Măsurarea tensiunilor şi ajustarea lor
ajustarea tensiunilor
Tensionarea lanţului de bicicletă
Măsurarea tensiunilor. –tensionmetre
Dinamometre pentru determinarea tensiunilor
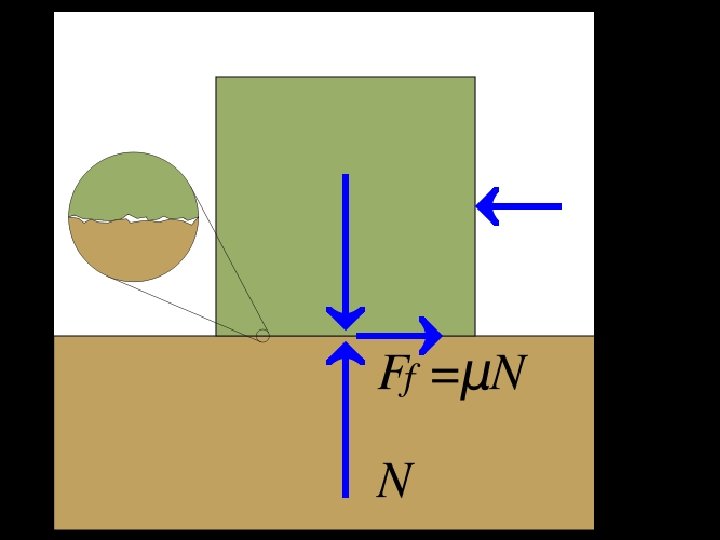
4. Forţe de frecare (la lunecare) v Ff Ff= forţa (tangentă corpului) din partea suprafeţei Ff =forţa cu care corpul acţionează asuprafeţei (legea a III a a dinamicii) Forţa de frecare acţionează în sens opus mişcării sau tendinţei de mişcare.
nu depinde de mărimea suprafeţelor în contact depinde de gradul de şlefuire a suprafeţei este proporţională cu apăsarea normală ( perpendiculara pe suprafata Mişcarea pe plan înclinat Mişcarea pe orizontală Gn Fn = G
F = μN f n μ = coeficient de frecare la lunecare adimensional raport a două forţe: frecarea şi apăsarea normala (reacţiunea suportului)
Reacţiunea suportului N G N* Gn Este forţa exercitată de un solid asupra sistemului în contact cu el. Direcţia: Pentru sisteme în repaus sau în m. r. u, direcţia rezultantei forţeler asuprea corpului. Sens : opus celui al rezultantei. Modul (valoare): calculabilă din legea fundamentală a dinamicii. Este o forţă de contact.
Principiul înaintării ( frecarea şi opusă ei, forţa de înaintare) Forţa de înaintare (din partea solului asupra omului) Forţa de frecare a piciorului cu solul
Forţa de propulsie (din partea terenului asupra maşinii) Forţa de frecare a roţii cu terenul Forţei de frecare îi corespunde o forţă egală, dar de sens contrar – forţa de propulsie (legea a III a a dinamicii) F =-F f p
• Uneori frecarea este utilă, trebuie mărită • alteori dăunătoare, trebuie diminuată
Procedee de mărire a frecării la lunecare
1. Mărirea forţei de frecare plăcuţe de frână saboţi frecarea utilă disc de ambreiaj
Ferodouri cu frecare mare Discuri de ambreiaj
Transmiterea mişcării cu frecare mare
Cauciucuri cu aderenţă mare Curele de transmisie a mişcării
Încălţăminte cu aderenţă sporită ( pentru circulaţia pe şosele alunecoase)
Micşorarea frecării
2. Micşorarea frecării la lunecare înlocuirea frecării la lunecare cu cea la rostogolire Lubrifiere utilizare de rulmenţi
2. Micşorarea frecării la lunecare sau înlocuirea frecării la lunecare cu cea la rostogolire
Ansambluri cu frecare mică
5. Forţa centripetă şi forţa centrifugă de inerţie • Sunt forţe caracteristice mişcărilor de rotaţie (în particular circulare) • Mişcarea circulară este accelerată (acceleraţie datorată schimbării direcţiei şi sensului vectorului viteză – acceleraţia centripetă ∆s / ∆v = R / v v ∆v v 2 a = ∆v / ∆t = v / R a = ω2 R
v r Fc 2 2 Fk = mac = mv/r = mωr ac Fk
Consecinţa existenţei forţei centrifuge: turtirea globului terestru
Instalaţie de simulare a acceleraţiei la apărute în navetele spaţiale
Instalaţie de simulare a acceleraţiei la apărute în navetele spaţiale
Carusel şi roata mare
storcător de miere
Diverse utilizări ale forţei centrifuge
Separatoare şi uscătoare centrifugale
Caruselul „ciclon” unde, la un moment dat, greutatea este depăşită de forţa centrifugă
forţele în diverse poziţii ale trenului parcului de distracţii
5. Forţa de atracţie universală Forţă care este proporţională cu masele corpurilor în interacţiune şi invers proporţională cu distanţa între centrelor lor. M m F 21 F 12 r F 21 = - F 12 F =k F 21 = F 12 Mm r 2 Forţa acţionează asupra tuturor corpurilor, dar creşte şi devine considerabilă pentru mase mari.
5. 1 greutatea m Pământ Definiţie : Greutatea este forţa de atracţie a Pământului asupra tuturor corpurilor materiale. Direcţia: verticală (dreapta care trece prin centrul obiectului si centrul Pământului). Sens : spre centrul Pământului. Modul (valoare) : depinde de masa m (în kg) şi acceleraţia gravitaţională a locului. g = 9, 8 N*kg 1 la Bucureşti Este o forţa care se exercită la distantă
5. 1. Greutatea este rezultanta forţei de atracţie universală şi forţei centrifuge de inerţie ce acţionează asupra unui corp aflat lângă Pământ. 2 2 g = k Mp / r = acceleraţie gravitaţională
5. 1. 1. Variaţia greutăţii cu latitudinea F =k G = F pol G G o 45 =F ecuator + Fcf = F – Fcf* Mm r 2 2 Fcf = m v / r
5. 1. 2. Variaţia greutăţii cu altitudinea Gh h G 0 G =k m M / R 0 p G h = G = k m M / (R + h) 2 p h G Rp 0 p 2 (Rp + h) 2 p 2
Greutatea corpurilor creşte cu latitudinea ( este minimă la ecuator şi maximă la poli), scade cu altitudinea ( este maximă la nivelul mării şi scade pe munţi). G >G pol ecuator
G condiţia de echilibru Fa = G
5. 1. 3. Lansarea unor sateliţi a. la suprafaţa Pământului b. la o anumită înălţime 2 2 2 Fcf 1 = m v 1 / Rp Fcf 2 = m v / (Rp+h) V 2 V 1 G 0 = Fcf 1 2 m go = mv 1 / Rp Gh= Fcf 2 v 1 = √ go Rp = prima viteza cosmica = 7, 9 km/s
Concluzia desenelor devine clară: lansarea sateliţilor artificiali necesită viteze mai mici, dacă lansarea lor se efectuează de la înălţimi mari. În cazul lansării de la sol la prima viteză cosmică, corpul „scapă” de atracţia Pământului, devenind satelit al acestuia; la atingerea celei de-a doua viteze cosmice, corpul devine satelit al Soarelui; pentru a treia viteză cosmică, corpul părăseşte Sistemul solar.
6. Forţe electrostatice apar între corpuri încărcate electric cele 2 forţe sunt egale în modul corpurile se consideră punctiforme (r >> R) q 1 q 2 F 12 F 21 r F 12 F = F 12 = F 21
Realizare: D. M. Imagini Internet