1 MODELING OF DIGITAL COMMUNICATION SYSTEMS USING SIMULINK

 for")









 EMLAB")
 25 EMLAB")
 26 EMLAB")
 27 EMLAB")
 29 측정 오차를 과소평가한 경우 오차에 대한 저항성을")
- Slides: 30
1 MODELING OF DIGITAL COMMUNICATION SYSTEMS USING SIMULINK 120150210 정보석 EMLAB
Contents 2 13. Simulink Examples 1. 2. 3. 4. Linear Predictive Coding (LPC) for Speech Compression 1. Speech Vocal Tract Model 2. Prediction Coefficients Computation 3. Speech Analysis and Synthesis RLS Interference Cancellation 1. Sinusoidal Interference 2. Low Pass Filtered Gaussian Noise Spread Spectrum 1. Spread Spectrum Simulink Model without In-Band Interference 2. Spread Spectrum Simulink Model with In-Band Interference 3. Spread Spectrum Simulink Model with In-Band Interference and Excision Antenna Nulling 5. Kalman Filtering 1. Scalar Kalman Filter 2. Kalman Equalizer 3. Radar Tracking Using Extended Kalman Filter(EKF) EMLAB
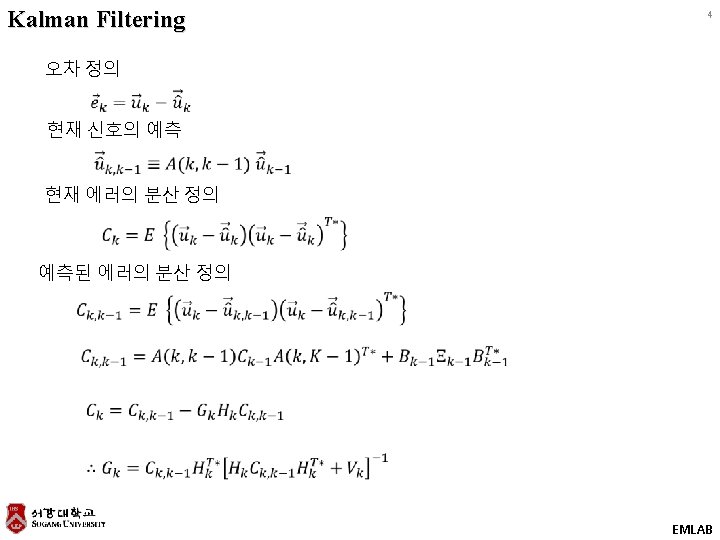
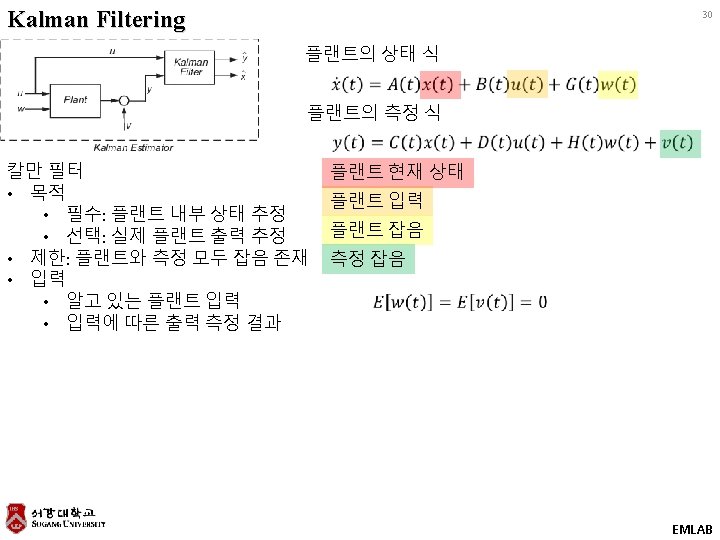
Kalman Filtering 정의 3 측정 EMLAB
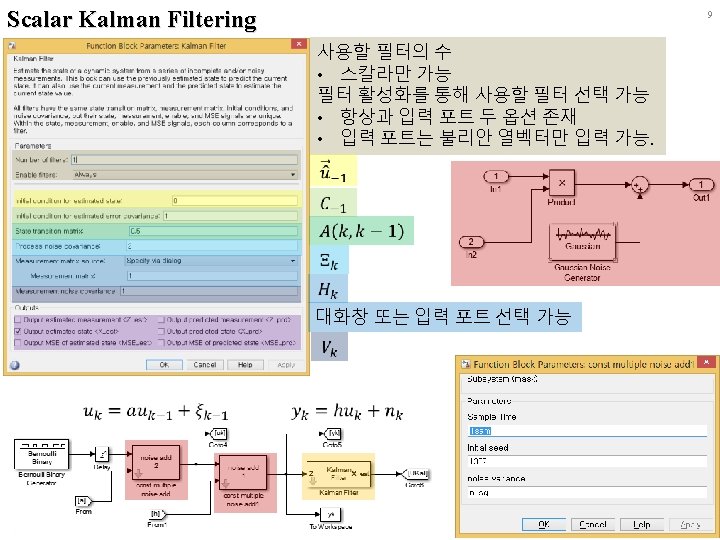
5 Scalar Kalman Filtering EMLAB
Scalar Kalman Filtering 6 앞의 식을 scalar로 변경 전이 행렬은 상수로 변경 EMLAB
Scalar Kalman Filtering 7 앞의 식을 scalar로 변경 전이 행렬은 상수로 변경 EMLAB
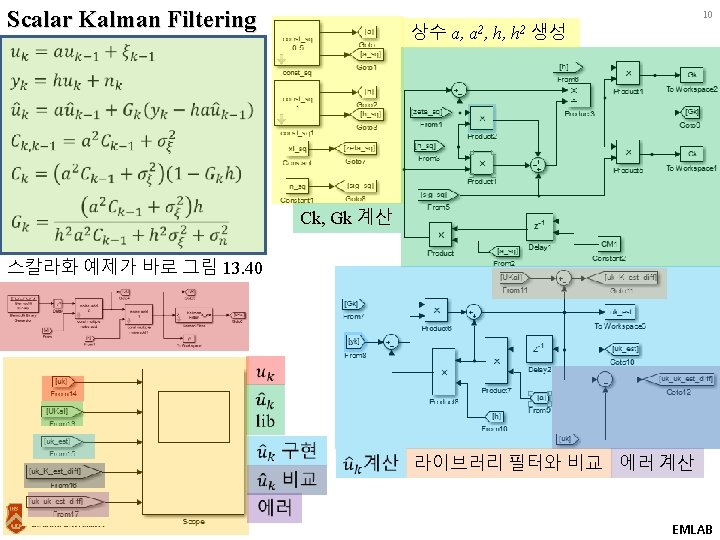
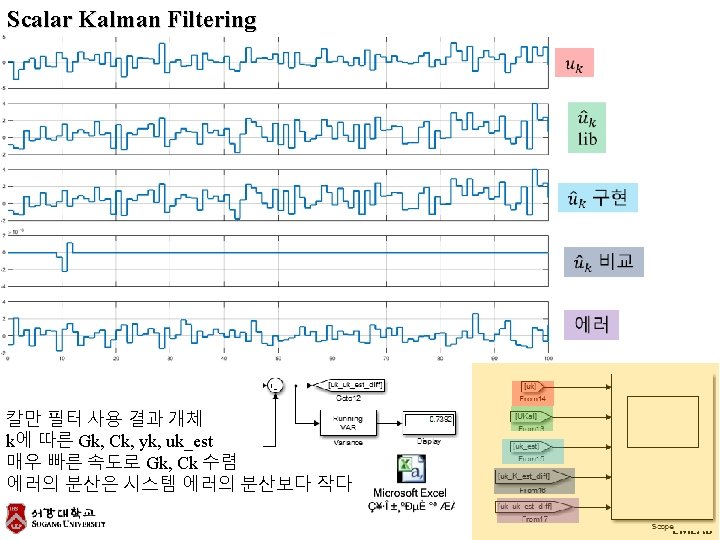
Scalar Kalman Filtering 8 스칼라화 예제가 바로 그림 13. 40 EMLAB
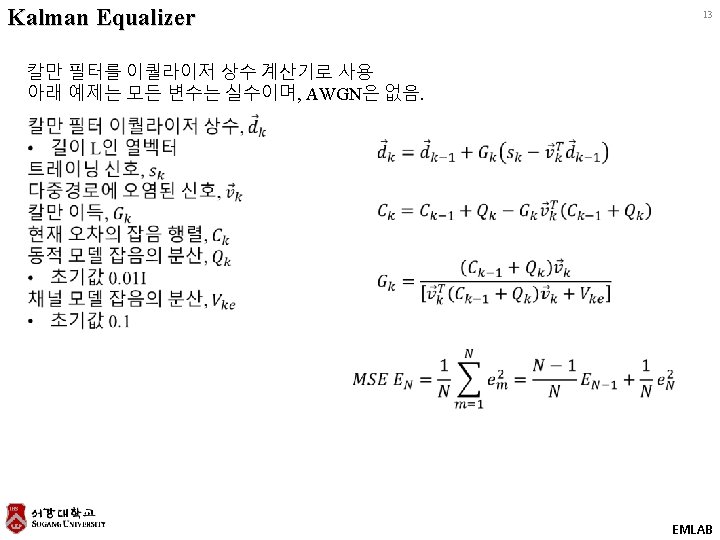
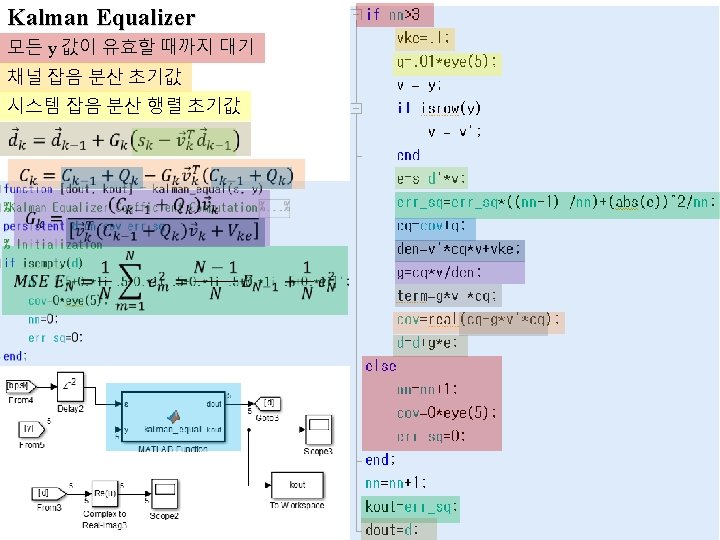
12 Kalman Equalizer EMLAB
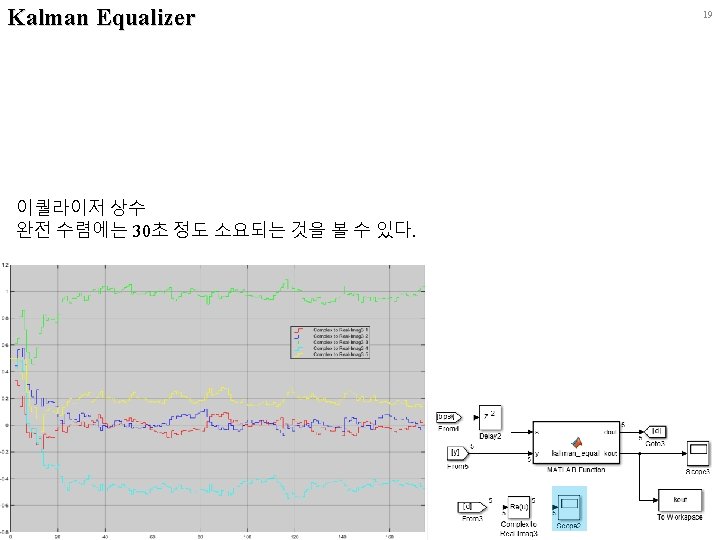
Kalman Equalizer 14 EMLAB
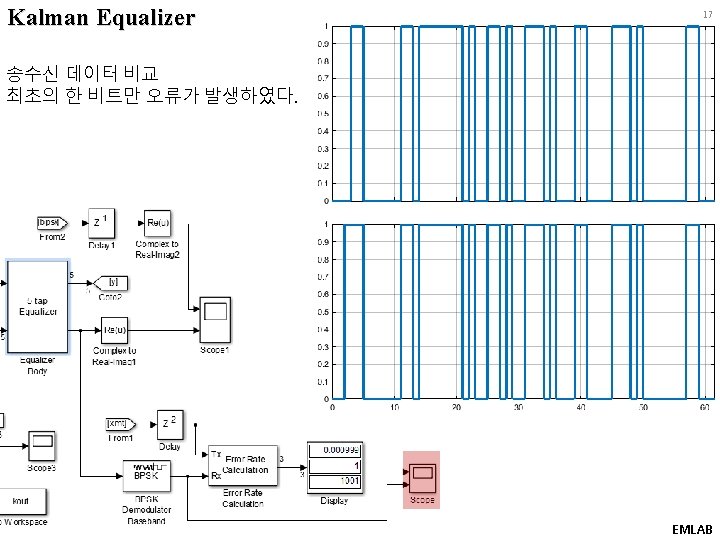
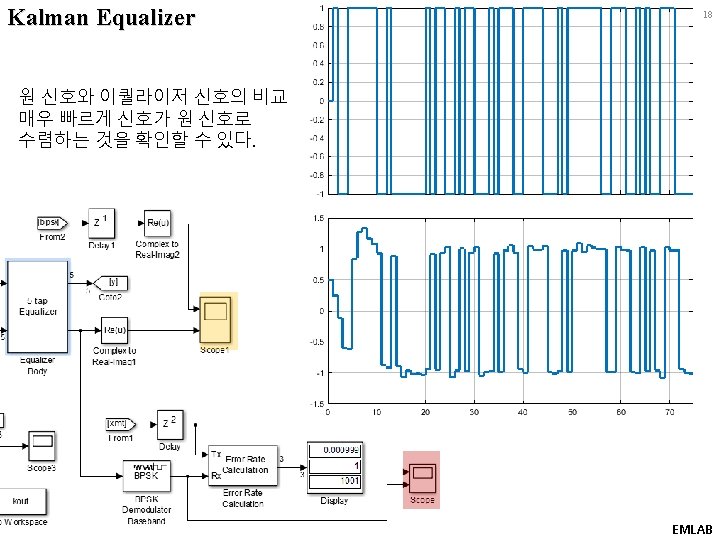
Kalman Equalizer 15 EMLAB
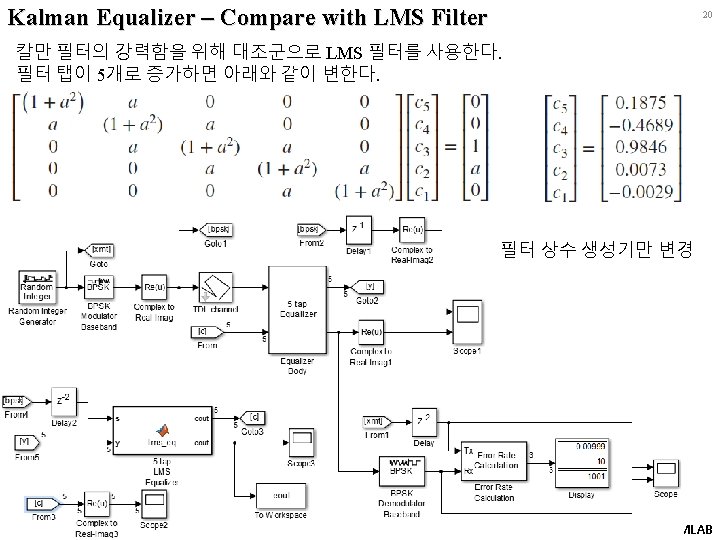
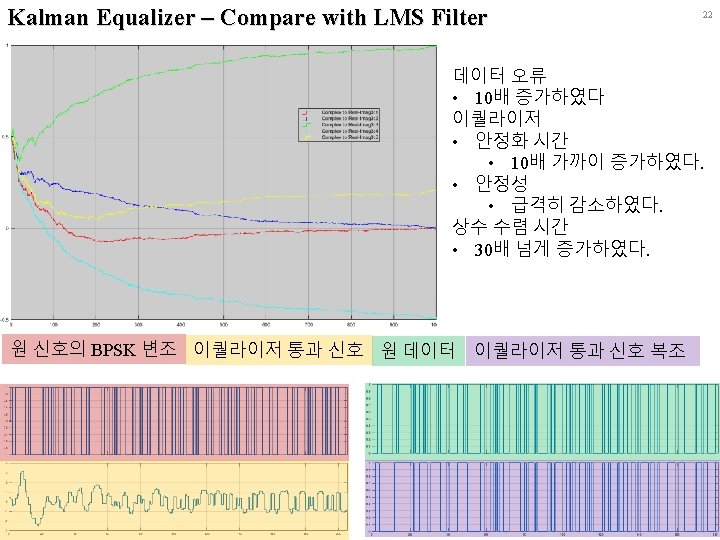
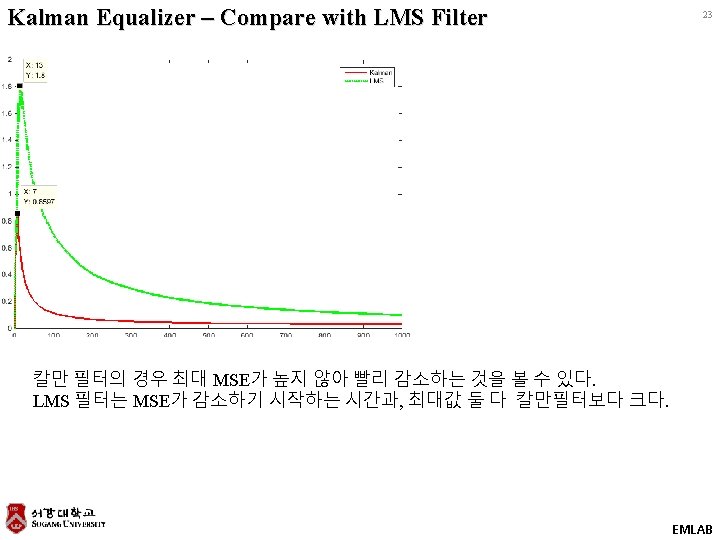
Kalman Equalizer – Compare with LMS Filter 21 EMLAB
24 Radar Tracking Using Extended Kalman Filter(EKF) EMLAB
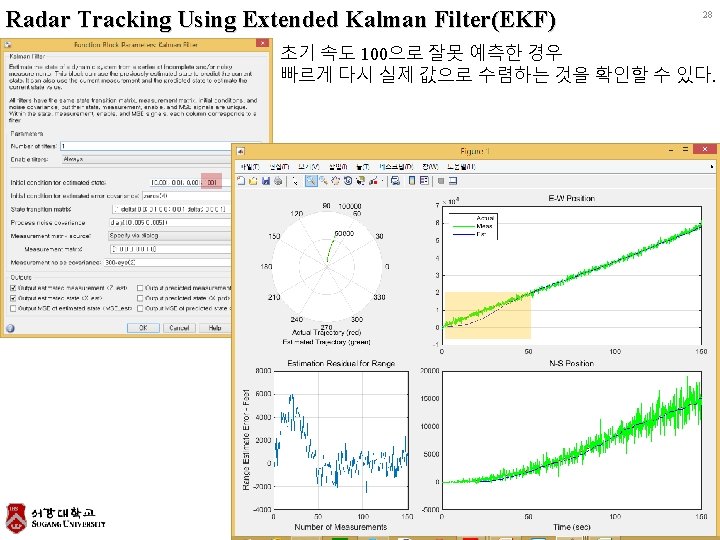
Radar Tracking Using Extended Kalman Filter(EKF) 25 EMLAB
Radar Tracking Using Extended Kalman Filter(EKF) 26 EMLAB
Radar Tracking Using Extended Kalman Filter(EKF) 27 EMLAB
Radar Tracking Using Extended Kalman Filter(EKF) 29 측정 오차를 과소평가한 경우 오차에 대한 저항성을 확인할 수 있다. EMLAB