1 BTSM Reprsentation temporelle du comportement des systmes

1 BTSM Représentation temporelle du comportement des systèmes Description de l’évolution séquentielle par GRAFCET Support technique Paletticc

1 BTSM Outil de description de l’évolution séquentielle GRAFCET Objectifs : • Le fonctionnement d’un système étant précisé : - construire le GRAFCET conforme au cahier des charges • Un GRAFCET étant donné : - justifier la structure du GRAFCET - établir l’expression d’une réceptivité - décrire les actions associées à une étape

1 BTSM Outil de description de l’évolution séquentielle GRAFCET Plan : 1. Cahier des charges Description globale Analyse séquentielle 2. Grafcet Principaux éléments Règles Exemples Eléments particuliers Séquences multiples Application au cahier des charges

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 1 -Cahier des charges PALETTICC 1. 1 Description globale Elle permet de connaître la géométrie du système, l’implantation des différents sous-ensembles qui le composent. Remplissage bouchage Etiquetage Mise en carton Fermeture du carton Palettisation Paletticc Formation du carton Evacuation EXEMPLE : CHAINE DE CONDITIONNEMENT DE BOITES DE THE

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 1 -Cahier des charges 1. 2 Analyse séquentielle Description du déroulement des opérations qui constituent le cycle réalisé par le système automatisé 1. 2. 1 Description littérale MODE DE FONCTIONNEMENT AUTOMATIQUE. CONDITIONS GENERALES MODE AUTOMATIQUE. "Prise d'origine" effectuée en mode manuel (voir § 6. 8 PRISE D'ORIGINE ELEVATEUR), Commutateur "Auto/Pas à Pas/Manu" sur la position "Auto" (ou sur la position Pas à Pas : voir § 8 MODE FONCTIONNEMENT PAS A PAS), Présence air, Absence défaut (voir § "Incidents"), Présence palette, Porte fermée. ETATS MACHINE POUR AUTORISER LE DEPART D'UN CYCLE. Elévateur position haute (prise d'origine), Pince ouverte, Transfert élévateur en position "prise de cartons" (à gauche), Rotation pince à 0° (position initiale), Palette vide (faisceau cellule REFLEX situé sur palette non coupé), Pousseur repos, Non détection carton en butée sur convoyeur, Non détection carton au poste de prise (en bout de course pousseur). Nota : Si ces états machine ne sont pas respectés, passage en mode manuel obligatoire pour replacer la machine en son état initial. Apparition des messages "NON EN ETAT INIT" et "MANU OBLIGATOIRE" ainsi que des messages d'états manquants. PRESELECTION ET VALIDATION DE LA HAUTEUR DES CARTONS. Etc…

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 1 -Cahier des charges 1. 2 Analyse séquentielle Description du déroulement des opérations qui constituent le cycle réalisé par le système automatisé 1. 4. 2 Grafcet Outil permettant de représenter graphiquement le fonctionnement d’un système automatisé en utilisant des symboles graphiques simples. 10 %X 8 -autorisation départ cycle-origine élévateur-pince fermée-cartons dans pince-rotation 0°-position prise-auto Transférer en Position Dépose 11 Elévateur en Position Dépose-Mrot 90° Elévateur en Position Dépose. Mrot 0° 13 Mettre la Pince en Rotation Mrot 90° Rotation 90°-Mrot 90° 15 Mettre la Pince Mrot 0° en Rotation rotation 0°-Mrot 0° auto 14 12 Dépose sur Palette Etape 21 Active

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 2 -GRAFCET GRAphe Fonctionnel de Commande Etape Transition 2. 1 Principaux éléments qui composent un GRAFCET - Etape – Transition – Action - Réceptivité Qu’est-ce qu’une étape : Une étape correspond à une situation dans laquelle les variables de sorties conservent leur état. Etape 2 Représentation : Un carré repéré numériquement 2 Qu’est-ce qu’une action : On précise pour chaque étape les actions à effectuer. Ces actions ne seront effectuées que si l’étape est active. Représentation : Les actions sont inscrites dans une étiquette reliée à la partie droite de l’étape. Etiquette 2 Fermer la pince Action

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 2 -Grafcet 2. 1 Principaux éléments qui composent le grafcet - Etape – Transition – Action - Réceptivité Qu’est-ce qu’une transition : Transition Une transition indique une possibilité d’évolution entre deux étapes successives. Représentation : Un trait 2 Fermer la pince 3 Monter préhenseur 2 Fermer la pince Qu’est-ce qu’une réceptivité : A chaque transition est associé une condition logique appelée réceptivité. Représentation : Réceptivité Les réceptivités sont inscrites à droite de la transition Les liaisons orientées : La lecture se fait de haut en bas. Dans le cas contraire, celle-ci est précisée par une flèche. Pince fermée 3 Monter préhenseur

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 2 -Grafcet 2. 2 Règles • Règle de syntaxe : L’alternance étape transition, transition étape est obligatoire • Règles d’évolution : 1) Etape initiale : Etape active au début du fonctionnement. Représentation : Un double carré 0 Etape 2 active 2) Validation d’une transition Une transition est dite validée si l’étape qui la précède est active. Représentation : Un point Transition validée 2 Fermer la pince Pince fermée 3 Monter préhenseur

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 2 -Grafcet 2. 2 Règles • Règles de syntaxe : L’alternance étape transition, transition étape est obligatoire • Règles d’évolution : 3) Franchissement d’une transition Une transition est franchie si elle est validée et si la réceptivité associée est vraie. 4) Activation désactivation Le franchissement d’une transition entraine simultanément l’activation de l’étape suivante et la désactivation de l’étape précédente. 2 Fermer la pince Pince fermée 3 Monter préhenseur

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 2 -Grafcet 2. 3 Exemple • Tête d’usinage Fonctionnement Approche en grande vitesse

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 2 -Grafcet 2. 3 Exemple • Tête d’usinage Fonctionnement PV Perçage en petite vitesse

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 2 -Grafcet 2. 3 Exemple • Tête d’usinage Fonctionnement GV Recul en grande vitesse

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 2 -Grafcet 2. 3 Exemple • Tête d’usinage Fonctionnement

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 2 -Grafcet 0 2. 3 Exemple Départ de cycle • Tête d’usinage Fonctionnement 1 Mettre la broche en rotation Broche en rotation 2 Broche Avancer en GV Approche terminée Recul terminé Perçage terminé Approche terminée 3 Tracer le grafcet correspondant au cahier des charges Broche Avancer en PV Perçage terminé 4 Broche Recul terminé Reculer en GV

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 2 -Grafcet 2. 3 Exemple 0 Départ de cycle • Tête d’usinage Fonctionnement 1 Mettre la broche en rotation Broche en rotation 2 Broche Avancer en GV Approche terminée 3 Broche Avancer en PV Perçage terminé 4 Broche Recul terminé Reculer en GV

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 2 -Grafcet 2. 3 Exemple 0 Départ de cycle • Tête d’usinage Fonctionnement 1 Mettre la broche en rotation Broche en rotation 2 Broche Avancer en GV Approche terminée 3 Broche Avancer en PV Perçage terminé 4 Broche Recul terminé Reculer en GV

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 2 -Grafcet 2. 3 Exemple 0 Départ de cycle • Tête d’usinage Fonctionnement 1 Mettre la broche en rotation Broche en rotation 2 Broche Avancer en GV Approche terminée 3 Broche Avancer en PV Perçage terminé 4 Broche Recul terminé Reculer en GV

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 2 -Grafcet 2. 3 Exemple 0 Départ de cycle • Tête d’usinage Fonctionnement 1 Mettre la broche en rotation Broche en rotation 2 Broche Avancer en GV Approche terminée 3 Broche Avancer en PV Perçage terminé 4 Broche Recul terminé Reculer en GV

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 2 -Grafcet 2. 3 Exemple 0 Départ de cycle • Tête d’usinage Fonctionnement 1 Mettre la broche en rotation Broche en rotation 2 Broche Avancer en GV Approche terminée 3 Broche Avancer en PV Perçage terminé 4 Broche Recul terminé Reculer en GV

http: //www. ep sic. ch/pagespe rso/maccaudo /Schema/Exer cices/Animatio ns. Flash/Grafce t. swf Exercice

Le wagonnet

1 BTSM Outil de description de l’évolution séquentielle GRAFCET Réinitialisation du sous Etape d’entrée de la macro étape 2 -Grafcet programme 2. 4 Eléments particuliers 10 Macro étape : Faire avancer le premier carton E 1 Carton en position X 2 11 Faire avancer le Elle représente un ensemble d’étapes transitions détaillé indépendamment. 11 appel premier carton Elle est utilisée pour simplifier la représentation. Pousser carton Premier carton poussé Représentation : Carton en position M 1 Macro étape 1 « Former un ensemble 12 de deux cartons (tâche 1)» Faire avancer le deuxième carton 12 Pousser carton Carton en position Premier carton poussé Sous programme appel réponse: 13 Faire avancer 13 le deuxième carton Lorsqu’une séquence Etape se répète plusieurs dans un cycle, il Carton en position de sortie de lafois macro étape est préférable de n’effectuer la programmation une seule fois 14 Représentation : Former un ensemble de deux cartons 2 X 15 Sous programme Deux cartons en position S 1 Pousser carton Deux cartons en position réponse 2 Pousser carton 15 Former un ensemble de deux cartons /X 2 Sous programme

1 BTSM 2 -Grafcet Outil de description de l’évolution séquentielle GRAFCET 2. 4 Eléments particuliers Etape encapsulante : Cette hiérarchisation est apparentée à la représentation par macro étape à ceci prêt que l’expansion est remplacée par un ou plusieurs grafcets. • Lorsque l’étape encapsulante 40 est activée, l’étape 2 du grafcet encapsulé G 5 repérée par un astérisque devient active. • Le grafcet encapsulé G 5 évolue alors indéfiniment en toute indépendance. • Lorsque la réceptivité b passe à 1 l’étape 40 est désactivée; ceci entraine instantanément la désactivation de toutes les étapes du grafcet encapsulé G 5, quelque soit sa situation.

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 2 -Grafcet 2. 5 Séquences multiples 2. 5. 1 Choix de séquence Le système comporte plusieurs séquences distinctes, il est nécessaire d’effectuer une sélection exclusive de l’une de ces séquences. En aucun cas il ne doit être possible d’effectuer ces séquences simultanément. Cahier des charges : Pont roulant

http: //www. ep sic. ch/pagespe rso/maccaudo /Schema/Exer cices/Animatio ns. Flash/Grafce t. swf L’appui sur S 1 provoque le déplacement vers la gauche, le retour étant provoqué par l’appui sur S 3. L’appui sur S 2 provoque le déplacement vers la droite, le retour étant provoqué par l’appui sur S 4.

1 BTSM Outil de description de l’évolution séquentielle GRAFCET grafcet 1 S 1 2 Translater à gauche S 5 3 S 3 4 Translater à droite S 6

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 2 -Grafcet 2. 5 Séquences multiples 2. 5. 1 Choix de séquence Règles • Règle de syntaxe : La divergence et la convergence OU sont représentées par un simple trait.

1 BTSM Outil de description de l’évolution séquentielle GRAFCET grafcet 1 Sélection exclusive de la séquence Divergence OU S 1. /S 2 2 S 2 5 Translater à gauche S 5 3 6 S 3 S 4 Translater à droite S 6 Translater à droite S 7 « pont à gauche » 4 . /S 1 Convergence OU 7 Translater à gauche S 6

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 2 -Grafcet 2. 5 Séquences multiples 2. 5. 2 Saut d’étapes Le saut d’étape permet de sauter une ou plusieurs étapes lorsque les actions à effectuer deviennent inutiles. 2. 5. 3 Reprise de séquence La reprise de séquence permet de reprendre une séquence lorsque les actions à réaliser sont répétitives. Attention: Respecter la règle de syntaxe concernant l’alternance « étape transition - transition étape »

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 2 -Grafcet 2. 5 Séquences multiples 2. 5. 4 Séquences simultanées Plusieurs effecteurs peuvent devoir effectuer une tâche simultanément Cahier des charges : Transfert de pièces

http: //www. ep sic. ch/pagespe rso/maccaudo /Schema/Exer cices/Animatio ns. Flash/Grafce t. swf Après le lancement d’un cycle, le tapis d’arrivée se met en marche jusqu’à ce qu’un carton atteigne le capteur S 1, le vérin A pousse le carton en S 3, puis le vérin B pousse le carton sur le tapis d’évacuation qui se met en marche.

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 1 Départ cycle 2 Mettre en marche le tapis d’arrivée S 1 3 arrêter le tapis d’arrivée S 3 4 B+ A+

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 1 Départ cycle Mettre en marche le tapis d’arrivée 2 S 1 3 Arrêter le tapis d’arrivée A+ Divergence ET S 3 Séquence 1 14 Séquence 2 B+ 24 S 2 S 5 15 Mettre en marche le tapis d’évacuation 35 Pièce évacuée Arrêter le tapis d’évacuation 16 Convergence ET =1 A- Les mouvements B+ et As’effectuent simultanément. BS 4 36 Réceptivité toujours vraie 26 L’étape 1 ne sera activée que lorsque les deux séquences (1 et 2) seront effectuées. La première séquence achevée attend l’autre « étapes de synchronisation 16 -36 -26 »

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 2 -Grafcet 2. 5 Séquences multiples 2. 5. 4 Séquences simultanées Règles • Règle de syntaxe : La divergence et la convergence ET sont représentées par un double trait. S 3 14 B+ S 5 Séquence 1 Divergence ET 24 AS 2 Séquence 1 16 26 Convergence ET =1 • Règles d’évolution : 1) Le franchissement d’une transition entraîne l’activation de toutes les étapes immédiatement suivantes et la désactivation de toutes les étapes immédiatement précédentes. 2) Plusieurs transitions simultanément franchissables sont simultanément franchies.

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 2 -Grafcet 2. 6 Actions particulières Condition d’assignation: * 15 * est une proposition logique, appelée condition d'assignation. Exemple: transfert de pièces Après le lancement d’un cycle, le tapis d’arrivée se met en marche jusqu’à ce qu’un carton atteigne le capteur S 1, le vérin A pousse le carton en S 3, puis le vérin B pousse le carton sur le tapis d’évacuation qui se met en marche.

Exemple: transfert de pièces

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 2 -Grafcet 2. 6 Actions particulières Action retardée: t 1/X 2 2 L'action associée ne sera commandée qu'après une durée t 1 à partir de l'activation de l'étape. Action limitée: t 1/X 2 2 L'action associée sera limitée à une durée t 1 à partir de l'activation de l'étape.

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 2 -Grafcet 2. 6 Actions particulières Action mémorisée: C'est une action associée à un événement interne, qui permet d'indiquer qu'une variable de sortie prend une valeur et la garde (jusqu'à une modification ultérieure), lorsque l'événement se produit. Action à l’activation: 2 Une action à l'activation est une action mémorisée associée à l'ensemble des événements qui conduisent à l'activation de l'étape. Action à la désactivation: 2 Une action à la désactivation est une action mémorisée associée à l'ensemble des événements qui conduisent à la désactivation de l'étape.

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 2 -Grafcet 2. 7 Réceptivités particulières Réceptivité dépendante du temps : 2 t 1/X 2 L'étape 2 est temporisée t 1 secondes par la variable temporisation. 3 Fronts d’une variable: 2 2 a 3 Les réceptivités a et a ne sont vraies que lorsque la variable change d'état, respectivement le front montant sera vrai lors du passage 0 1 de la variable et le front descendant lors du passage 1 0.

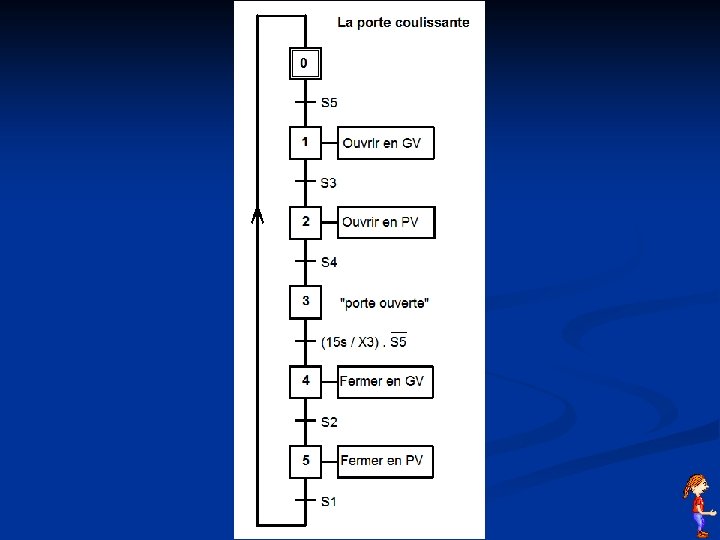
http: //www. ep sic. ch/pagespe rso/maccaudo /Schema/Exer cices/Animatio ns. Flash/Grafce t. swf Lorsqu’une personne se présente devant la porte, elle est détectée par S 5 ; la porte s’ouvre, d’abord en grande vitesse (GV) jusqu’à S 3, puis termine son ouverture en petite vitesse (PV ) jusqu’à S 4. La porte reste ouverte pendant 15 s, puis, si personne ne se présente à nouveau, elle se referme d’abord en grande vitesse jusqu’à S 2 puis termine sa fermeture en petite vitesse jusqu’à S 1.

http: //www. ep sic. ch/pagespe rso/maccaudo /Schema/Exer cices/Animatio ns. Flash/Grafce t. swf Lorsqu’une pièce est présente dans le panier, l’appui sur le bouton poussoir S 6 provoque le déplacement du panier dans le bain de dégraissage. Après 50 s de traitement le panier est déplacé en zone de dépose des pièces traitées. L’appui sur le bouton poussoir S 7 provoque le retour du panier en zone de chargement des pièces.

GRAFCET linéaire

1 BTSM Outil de description de l’évolution séquentielle GRAFCET Séquences multiples Reprise de séquence La reprise de séquence permet de reprendre une séquence lorsque les actions à réaliser sont répétitives. Cahier des charges : Bac de dégraissage Le cycle « monter – translater à droite – descendre » se répète deux fois

GRAFCET avec reprise de séquence Reprise de séquence Attention: Respecter la règle de syntaxe concernant l’alternance « étape transition - transition étape » (Test de relâchement du capteur S 2)

1 BTSM Outil de description de l’évolution séquentielle GRAFCET Séquences multiples Saut d’étapes ou saut de séquence Le saut d’étape permet de sauter une ou plusieurs étapes lorsque les actions à effectuer deviennent inutiles. Cahier des charges : Bac de dégraissage Cycle 1 Les pièces sont transférées directement vers le poste de déchargement. Cycle 2 Les pièces sont dégraissées avant d’être transférées au poste de déchargement. L’opérateur effectue le choix du cycle grâce à un commutateur (S 8)

GRAFCET avec saut de séquence Saut de séquence Attention: Respecter la règle de syntaxe concernant l’alternance « étape transition - transition étape »

Exercice : Poste de regroupement

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 3 -Niveaux de description Notion de point de vue système (besoin utilisateur) partie opérative (après choix des actionneurs, effecteurs) partie commande (après choix des préactionneurs, capteurs)

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 3 -Niveaux de description 3. 1. Point de vue système Le grafcet est établi en regardant la matière d’œuvre (produit) sur laquelle agit le système, on suit son évolution étape après étape.

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 3 -Niveaux de description 3. 1. Point de vue système Exemple : Unité de perçage GRAFCET selon le point de vue système : départ cycle et conditions initiales Perçage 2 Perçage 1 Les perçages 1 et 2 sont effectués simultanément après avoir appuyé sur un bouton-poussoir fin de perçage 1 =1 fin de perçage 2

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 3 -Niveaux de description 3. 2. Point de vue partie opérative Le grafcet est établi à partir de la connaissance des constituants de la partie opérative (effecteurs, actionneurs), Il décrit les actions effectuées par ces composants, sous forme littérale ou forme codée (mnémoniques).

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 3 -Niveaux de description 3. 1. Point de vue partie opérative Exemple : Unité de perçage Actionneurs : la rotation des forets est assurée par les moteurs électriques M 1 et M 2 ; la translation des perceuses est assurée par les vérins pneumatiques V 1 et V 2. Des capteurs détectent les positions : perceuse 1 en haut, perceuse 1 en bas, perceuse 2 à gauche, perceuse 2 à droite. GRAFCET selon le point de vue partie opérative : départ cycle et perceuse 1 en haut et perceuse 2 à droite Rotation foret 1 Descendre perceuse 1 en bas Rotation foret 1 Remonter perceuse 1 en haut =1 Rotation foret 2 Avancer perceuse 2 à gauche Rotation foret 2 Reculer perceuse 2 à droite

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 3 -Niveaux de description 3. 2. Point de vue partie commande Le grafcet est établi à partir de la connaissance des constituants de la partie commande (préactionneurs, capteurs), Il décrit les commandes émises par ces composants, en fonction des comptes-rendus des capteurs, sous forme codée.

1 BTSM Outil de description de l’évolution séquentielle GRAFCET 3 -Niveaux de description 3. 1. Point de vue partie commande Exemple : Unité de perçage Les actionneurs sont commandés par les préactionneurs suivants : KM 1 : moteur M 1, KM 2 : moteur M 2, Y 1+ : avancer vérin V 1, Y 1 - : reculer vérin V 1, Y 2+ : avancer vérin V 2, Y 2 - : reculer vérin V 2. Les capteurs sont nommés par : S 2 : perceuse 1 en haut, S 3 : perceuse 1 en bas, S 4 : perceuse 2 à gauche, S 5 : perceuse 2 à droite, S 1 : départ cycle. GRAFCET selon le point de vue partie commande : S 1. S 2. S 5 KM 1 Y 1+ KM 2 Y 2 - S 4 S 3 KM 1 Y 1 S 5 S 2 =1


Outils de description des systèmes automatisés GRAFCET 2 -Grafcet 2. 6 Application au cahier des charges Grafcet (avec macro étapes)

GRAPHE DE COORDINATION DES TACHES EN MODE AUTOMATIQUE 0 Conditions de marche automatique « Former un ensemble de deux cartons (tâche 1)» M 1 =1 1 -2 3 -2 =1 « Saisir les deux cartons (tâche 2)» M 2 =1 « Déposer les deux cartons (tâche 3)» M 3 =1 Conditions de marche automatique : Élévateur haut. Pince ouverte. Transfert élévateur position « prise » . Palette vide. Pousseur repos. Pas de carton en butée convoyeur. Pas de carton poste de prise.

GRAPHE DE COORDINATION DES Faire avancer le TACHES EN MODE E 1 AUTOMATIQUE 0 premier carton Conditions de marche automatique Carton en position « Former un ensemble de deux cartons (tâche 1)» M 1 11 =1 Pousser carton Premier carton poussé 1 -2 3 -2 12 Faire avancer le deuxième carton Carton en position =1 « Saisir les deux cartons (tâche 2)» M 2 13 Pousser carton Deux cartons en position =1 S 1 « Déposer les deux cartons (tâche 3)» M 3 =1 Conditions de marche automatique : Élévateur haut. Pince ouverte. Transfert élévateur position « prise » . Palette vide. Pousseur repos. Pas de carton en butée convoyeur. Pas de carton poste de prise.

SOMMAIRE SCHEMAS ELECTRIQUES PNEUMATIQUE GRAFCETS ENTREES SORTIES API GRAPHE DE COORDINATION DES TACHES EN MODE AUTOMATIQUE 0 Conditions de marche automatique « Former un ensemble de deux cartons (tâche 1)» M 1 E 2 Descendre le préhenseur Préhenseur en position basse =1 1 -2 3 -2 21 Saisir les deux cartons Cartons saisis =1 « Saisir les deux cartons (tâche 2)» M 2 22 Remonter le préhenseur Préhenseur en position haute =1 S 2 « Déposer les deux cartons (tâche 3)» M 3 =1 Conditions de marche automatique : Élévateur haut. Pince ouverte. Transfert élévateur position « prise » . Palette vide. Pousseur repos. Pas de carton en butée convoyeur. Pas de carton poste de prise.

E 3 préhenseur coté palette. rangée paire 31 Tourner les cartons de 90° Cartons tournés 32 préhenseur coté Conditions palette. rangée impaire M 1 de marche automatique « Former un ensemble de deux cartons (tâche 1)» Déposer les deux cartons =1 sur la palette Cartons déposés 33 GRAPHE DE COORDINATION DES TACHES EN MODE AUTOMATIQUE Déplacer le préhenseur vers la palette 0 1 -2 3 -2 Relâcher les deux cartons Cartons relâchés 34 Système en position haute. pince à 90° 35 =1 Remonter le système préhension Tourner la pince à 0° « Saisir les deux cartons (tâche 2)» M 2 Système en position haute. Pince à 0° =1 Pince à 0° 36 Déplacer le préhenseur vers les cartons Préhenseur coté « prise » S 3 « Déposer les deux cartons (tâche 3)» M 3 =1 Conditions de marche automatique : Élévateur haut. Pince ouverte. Transfert élévateur position « prise » . Palette vide. Pousseur repos. Pas de carton en butée convoyeur. Pas de carton poste de prise.
")
AII 2 -Grafcet 2. 6 Application au cahier des charges Grafcet (avec sous-programmes appel-réponse)

GRAFCET SOMMAIRE 9 GRAFCETS 10 DESCENTE-PRISE-MONTEE 11 TRANSFERT POSITIONNEMENT CARTONS 12 DÉPOSE SUR PALETTE 13 RETOUR POSITION PRISE 14 CONVOYEUR POUSSEUR

SOMMAIRE 10

SOMMAIRE 11

SOMMAIRE 12

SOMMAIRE 13
 14")
SOMMAIRE (SP Convoyeur pousseur) 14

- Slides: 70