1 2 3 Navy Prototype Optical Interferometer Squared




 20 ft干渉計:Mt. Wilson A. Michelson F. G. Pease ベテルギウス他の視直径を測定")

 (1979 Mark. I, 1982~ 4 Mark. II) 1982~Mt. Wilson (NRL, SAO,")

, Baseline: 430 m Astrometry, Imaging;")



![visibility 一様円盤の場合 the first zero or the first minimum baseline[m] 観測波長 800 nm、円盤の大きさ 3.](https://slidetodoc.com/presentation_image_h/d8541281946242d91412757b317c7d1f/image-21.jpg "visibility 一様円盤の場合 the first zero or the first minimum baseline[m] 観測波長 800 nm、円盤の大きさ 3.")


 A&A, Domiciano de Souza et al. (2003)")


が良くあう c 2=7. 5(LD), c 2=17.")


- Slides: 38
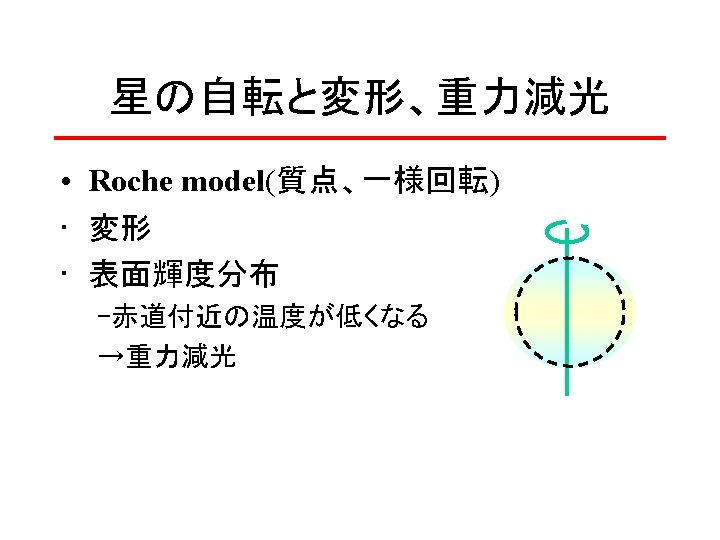
目次 1. 光赤外干渉計 2. 光赤外干渉計による高速自転星の観測 3. 私たちの観測 – Navy Prototype Optical Interferometer – Squared Visibility amplitudeと変形 – Closure phaseと表面輝度分布 4. まとめ
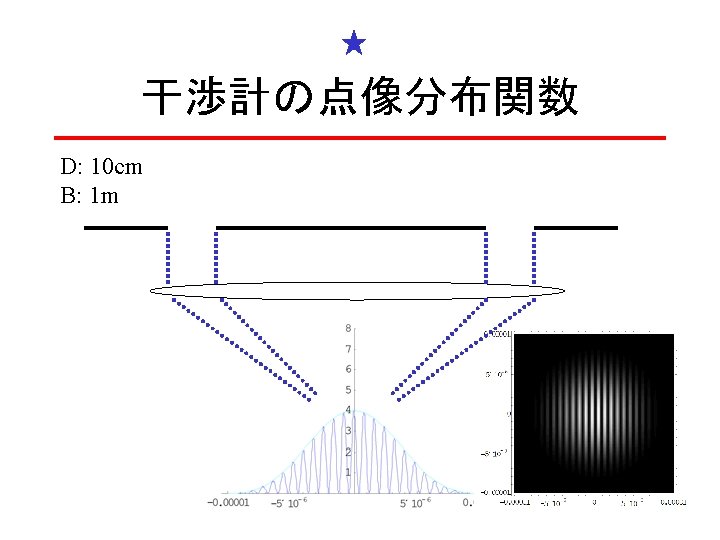
干渉計の分解能 D: 10 cm, B: 1 m λ/B=0. 1″ I max-I min Visibility= Imax+I min
1 -2. 光赤外干渉計の歴史 • • • 1868 Fizeau 1920 Michelson & Pease 1956 Hanbury Brown&Twiss(Intensity) Fizeau 1975 Labeyrie(I 2 T: direct interference) 1986 Mark. III(direct Michelson) 以降 NPOI, PTI, COAST, IOTA, SUSI, CHARA, MIRA, etc… • 2002~ 3 Keck, VLTI
Michelson & Pease (1920) 20 ft干渉計:Mt. Wilson A. Michelson F. G. Pease ベテルギウス他の視直径を測定
1 -2. 光赤外干渉計の歴史 • • • 1868 Fizeau 1920 Michelson & Pease 1956 Hanbury Brown&Twiss(Intensity) 1975 Labeyrie(I 2 T: direct interference) 1986 Mark. III(direct Michelson) 以降 NPOI, PTI, COAST, IOTA, SUSI, CHARA, MIRA, etc… • 2002~ 3 Keck, VLTI
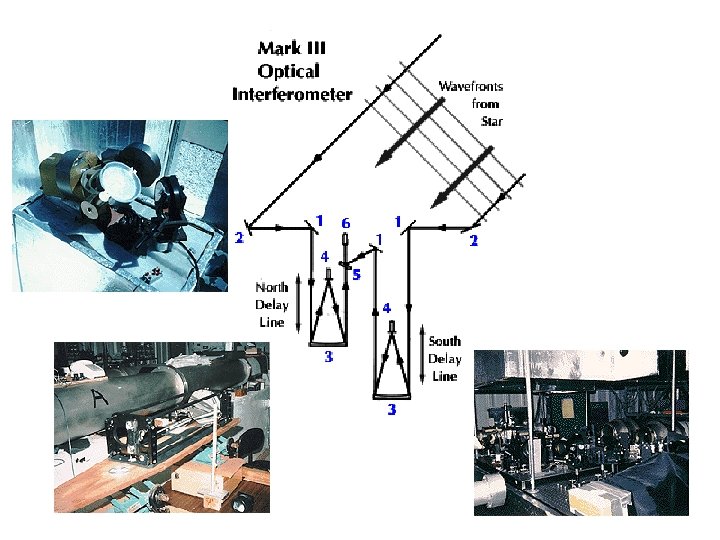
技術の確立:Mark. III(1986 -1988) (1979 Mark. I, 1982~ 4 Mark. II) 1982~Mt. Wilson (NRL, SAO, MIT, USNO) Shao, Colavita, Simon, et. al. • Michelson型(1次元検出器) • 遅延線の分離、真空化 • tip-tilt制御 • 高効率の検出器
Projected Baseline delay 望遠鏡 Beam Combiner 遅延線
Navy Prototype Optical Interferometer Diameter: 50 cm(eff: 13 cm), Baseline: 430 m Astrometry, Imaging; multi-baseline (6) and multi-channel (32) Stellar diameter, Limb darkening, etc…
CHARA Diameter: 1 m, Baseline: 400 m Target: Stellar diameter, Limb darkening, Cepheid, etc… S 1 S 2 W 2 330 m E 1 E 2 W 1
Keck Diameter: 10 m, Baseline: 100 m, λ: J, H, K, L, M, N target:Hot Jupitar, T Tauri, Herbig Ae/Be Be stars, Mira variables, AGN, Supernovae
VLTI Diameter: 8 m, baseline 220 m Target: AGN, Exo-Zodiacal Light, Be stars , Wolf-Rayet stars, Post AGB stars
visibility 一様円盤の場合 the first zero or the first minimum baseline[m] 観測波長 800 nm、円盤の大きさ 3. 2 masの場合
Squared visibility amplitude Uniform disk model and Limb darkening model UD LD 星表面の構造は、first zeroを超える分解能がないと良く分からない
目次 1. 干渉計とは 2. 干渉計による高速自転星の観測 3. 私たちの観測 – Navy Prototype Optical Interferometer – Squared Visibility amplitudeと変形 – Closure phaseと表面輝度分布 4. まとめ
これまでの観測 2. (Achernar) A&A, Domiciano de Souza et al. (2003)
目次 1. 干渉計とは 2. 干渉計による高速自転星の観測 3. 私たちの観測 – Navy Prototype Optical Interferometer – Squared Visibility amplitudeと変形 – Closure phaseと表面輝度分布 4. まとめ
Navy Prototype Optical Interferometer AN AW AE AC W 7
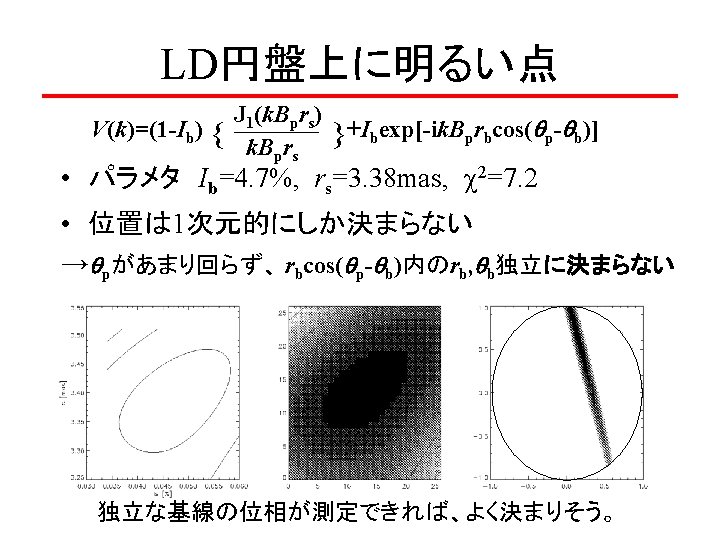
2 各基線で測定されたV Vega Limb darkening model(T=9500 K, logg=4. 0)が良くあう c 2=7. 5(LD), c 2=17. 2(UD) 点線UD 実線LD Altair LDもUDもあまり良く合わない。特にOB 3。 c 2=150(LD), c 2=154(UD)
Non-zero/p closure phase Vega Altair 小さな明るい領域が星の表面にある。
LD+明るい点 model 楕円体モデルの最適解から sin i=0. 58, i=35° Vc=430 km/s, Vc× 0. 58=250 km/s, vsini=190~ 250 km/s