042709 050109 n Tasks performed last week u






- Slides: 8
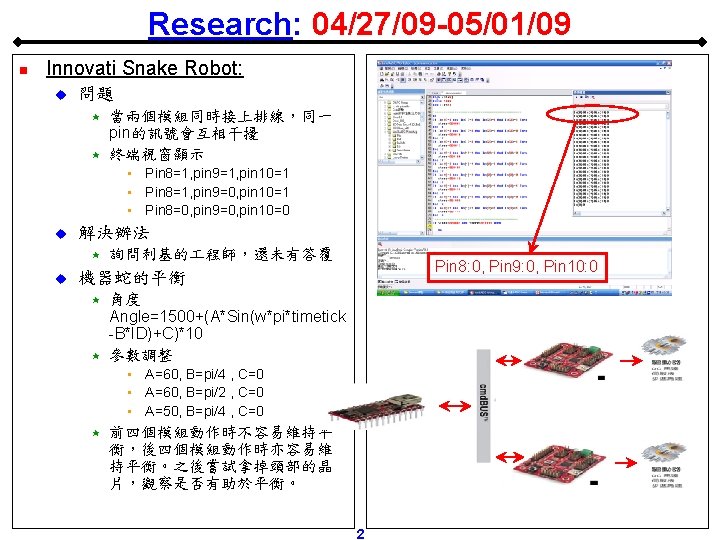
潘建志: 04/27/09 -05/01/09 n Tasks performed last week u Research « « u « « Innovati snake robot Read papers « « Research « « u 隨機控制 即時控制系統設計 機器人感測與控制 « « u 專題討論 NCSLab meeting Group meeting 隨機控制 即時控制系統設計 機器人感測與控制 Seminar « « 1 Innovati snake robot Read papers Courses « Seminar « Tasks planned next week u Courses « u n 專題討論 仿生會議 NCSLab meeting Group meeting
Courses: 04/27/09 n 隨機控制: u Teacher « u u Monday 234 電二102 Evaluation « « « u Applied Optimal Estimation By A. Gelb Location « u « 張帆人 教授 Time « Homework 30% Midterm 30% Final exam 40% Schedule « « Content « Textbook « u u Midterm 4/13 Final exam 6/15 3 Time update Measurement update
Courses: 04/27/09 n 及時控制系統設計: u Teacher « u « « u Franklin, Powell, Workman, “Digital Control of Dynamic Systems, ” 1998 Papers Monday 567 明達 225 Evaluation « Homework/Program assignment 30% Presentation 20% Project report 50% Course Webpage « Schedule Content « Location « u 連豊力 教授 Time « u u Textbook « u u http: //cc. ee. ntu. edu. tw/~fengli/Te aching/RTCS/ 4 Techniques for enhancing the performance of discretized controllers
Courses: 04/29/09 n 機器人感測與控制: u Teacher « u u The Instructor Will Provide The Text Materials (Student Pay Their Own Copy Costs) For Each Chapter As Handouts. References Will Be Included In The Lecture And Project Assignment. Wednesday ABC 明達 303 Evaluation « « Take home project report 40% Project presentation during the class 10% Midterm exam 25% Final exam 25% 5 HW 1 Content « Location « u u 羅仁權 教授 Time « Schedule « Textbook « u u 停課 Due data: 05/06
Seminar: 04/29/09 n 專題討論: u Title « « « u « « « Better Efficiency of Snake Robot with Variation of Bending Angles Adaptive Critic Braking Control System to Optimize Vehicle’s Traction and Yaw Performance Applied Taguchi Method to Tune PID Controller « Adaptive Critic Braking Control System to Optimize Vehicle’s Traction and Yaw Performance • Basic concept of by-wire technology – Replace the vehicle’s traditional mechanical systems with electronic ones Yu-Min Lin Hsien-Ping Chu … • ACD « Applied Taguchi Method to Tune PID Controller • Taguchi method 電二209 Time « Better Efficiency of Snake Robot with Variation of Bending Angles • Serpenoid curve Location « u Content Speaker « u u Wednesday 78 6
Seminar: 04/29/09 n NCSLab meeting: u Title « u Speaker « u 明達 325 Time « u 銘佐 Location « u Robot Pose Estimation in Unknown Environments by Matching 2 D Range Scans Wednesday, 2: 00 pm-3: 20 pm Content « « ICP IDC 7